Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




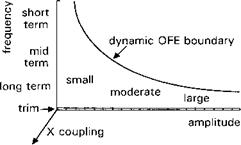
At a deeper level the response types themselves can be classified further in terms of their frequency and amplitude characteristics, a perspective that we found useful in the modelling discipline described in the previous stop on this Tour. Figure 2.37 illustrates the structure, with the response classified into three levels of amplitude (small, moderate and large) and three frequency ranges, corresponding to long-, mid – and short-term behaviour. The zero frequency motion is identified as the trim line. In recognition of the multitude of cross-couplings inherent to helicopters, we have added the third dimension on the figure; to date, the criteria for cross-coupling requirements are considerably more immature than for the direct response. The boundary curve in the figure indicates the limits to practical flying, with higher frequency attitude and flight path motions restricted to small amplitude, and large amplitude motions restricted to
|
Fig. 2.37 Frequency and amplitude characterization of aircraft response |
the lower frequency range. This representation will provide a convenient structure for developing quantitative response criteria later in Chapter 6.
Typical helicopter characteristics can now be discussed within the framework of this response-type classification. An unstable, low-frequency oscillation involving changes in speed and height characterizes the mid-long term, small amplitude response and stability of helicopter pitch motion. This mode can take the formof a mildly unstable pendulum-type motion in the hover, to a rapidly divergent ‘phugoid’ oscillation at high speed. Aircraft design and configuration parameters, e. g., cg location, rotor type and tailplane design, can have a marked effect on the stability of this mode in forward flight. At forward cg extremes, the oscillation can stabilize at moderate speeds, whereas with aft cg loadings for some configurations, particularly hingeless rotors or helicopters with small horizontal tailplanes, the oscillation can ‘split’ into two aperiodic divergences at high speed, with time to double amplitude less than 1sin severe cases. The mode differs from the fixed-wing ‘phugoid’ in that speed changes during the climbs and dives induce pitching moments, which cause significant variations in fuselage and rotor incidence and thrust.