
Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




For the small amplitude, higher frequency end of the response spectrum, two classic measures of quality – the step response character and low-order-equivalent system (LOES) response – have proved deficient for capturing the important features that relate to tracking and pursuit-type tasks in helicopters. The equivalent systems approach adopted in the fixed-wing community has many attractions, but the rotorcraft’s non-classical response types really make the LOES a non-starter in most cases. Also, the detailed shape of the step response function appears to be sensitive to small imperfections in the control input shape and measurement inaccuracies. Strictly, of course, the small amplitude tracking behaviour should have little to do with the step response and much more to do with amplitude and phase at high frequency. Nevertheless, the direction taken by ADS-33, in this area, was clarified only after considerable debate and effort, and it is probably fair to say that there is still some controversy associated with the adoption of the so-called bandwidth criteria.
For simple response types, maximum quickness is actually a close approximation to this more fundamental handling qualities parameter – bandwidth (Ref. 2.32). This parameter will be discussed in more detail in Chapter 6, but some elaboration at this point is worthwhile. The bandwidth is that frequency beyond which closed-loop stability is threatened. That may seem a long step from the preceding discussion, and some additional exposure is necessary. For any closed-loop tracking task, the natural delays in the pilot’s perceptual pathways, neuro-muscular and psycho-motor systems (Ref. 2.33), give rise to increasing control problems as the disturbance frequency increases. Without the application of pilot control lead, the closed-loop pilot/aircraft system will gradually lose stability as the pilot gain or disturbing frequency increases. The point of instability is commonly referred to as the crossover frequency and the bandwidth frequency corresponds to some lower value that provides an adequate stability margin. In practice, this is defined as the highest frequency at which the pilot can double his gain or allow a 135° phase lag between control input and aircraft attitude response without causing instability. The higher the bandwidth, the larger will be the aircraft’s safety margin in high gain tracking tasks, but just as we have implied a possible upper limit on the quickness, so bandwidth may be limited by similar overresponsiveness.
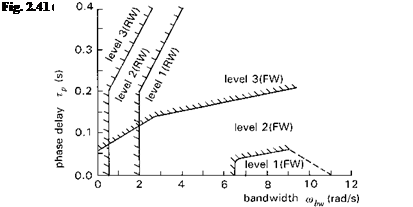
We have introduced some new flying qualities parlance above, e. g., crossover, perceptual pathways, gain and lead/lag, and the reader will need to carry these concepts forward to later chapters for elaboration. The whole question of short-term attitude control has been discussed at some length because of its critical importance to any flying task; changing attitude tilts the rotor thrust vector and reorients the aircraft and hence the flight path vector. It is not surprising that handling criteria are most substantially developed on this topic. For the case of small amplitude, high-frequency pitch motions (see Fig. 2.37), bandwidth criteria have been developed for both fixed- and rotary-wing aircraft. For both types of aircraft the criteria are displayed in two-parameter form with the phase delay parameter, Tp. Phase delay relates to the rate of change of phase with frequency above the crossover frequency and is also a measure of the equivalent time delay between attitude response and pilot control input. Fig. 2.41 tells a similar story to the comparison of fixed – and rotary-wing criteria for mid-term stability (cf. Fig. 2.39); there is a range in the Tp, rnbw plane where Level 1 helicopter characteristics correspond to Level 3 aeroplane characteristics. The boundaries in Fig. 2.41 are typical of the mission-oriented criteria found in modern specifications; they apply to air-combat tasks for helicopters and, more generally, to Category A flight phases for aeroplanes (see Ref. 2.3). They have been developed from the best available test data relating to current operational requirements. To a large extent, the striking differences between the fixed – and rotary wing relate directly to different task requirements; as yet, rotarywing aircraft have not been required to deliver the performance of their fixed-wing counterparts. On the other hand, it would be very difficult to confer such bandwidth performance on a conventional helicopter from an engineering point of view, so a large
degree of capability tailoring is inevitable. In later chapters, some of the configuration constraints and design limitations will be discussed in more detail.
Earlier, we dismissed equivalent low-order systems as being inadequate at characterizing helicopter attitude characteristics. While this is true for conventional helicopters without, or having limited authority, stability and control augmentation, future aircraft with task-tailored control laws can more usefully be described in this way. Later, in Chapters 6 and 7, we shall introduce the conceptual simulation model (CSM, Ref. 2.34), which is, in effect, a greatly simplified helicopter model in LOES form. The assumption underlying this model structure is that with active control, the flying qualities can be tailored in a wide range of different forms described now by simple equivalent systems. Flying qualities research at DRA using the CSM has been ongoing since the early 1980s and has enabled many of the desirable characteristics of future helicopters with active control technology (ACT) to be identified. This theme will be pursued in the later flying qualities chapters.
There is one helicopter flying characteristic that can, at least for the limited frequency range associated with pilot control, be described in terms of a simple first – order response – the vertical or heave axis in the hover. While it is recognized that the vertical axis dynamics are dominated by air mass and flapping motion at higher frequency, below about 5 rad/s the vertical velocity response (h) to collective (Sc) can be described by the LOES:
![]()
 |
h _ Ke Theqs Sc Tf. s + 1
heq
This formulation characterizes the first-order velocity response as a transfer function, with gain or control power K and time delay Tf. The pure time delay Tf is an artifact included to capture any initial delay in achieving maximum vertical acceleration, e. g., due to rotor or air-mass dynamics. The acceptable flying qualities can then be defined in terms of the LOES parameters. Vertical axis flying qualities and flight path control in forward flight are also profoundly affected by the dynamic characteristics of the engine and rotorspeed governor system. Agile behaviour can be sustained only with rapid and
sustained thrust and torque response, both of which are dependent on fast powerplant dynamics. As usual there is a trade-off, and too much agility can be unusable and wasteful. This will be a recurring theme of Chapter 7.
