Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




The instantaneous thrust and power associated with a vertical flight condition is affected by the rate of change of collective pitch. This is of some significance in its effect on performance during jump take-offs and in landing flares from vertical autorotation. It is of even more significance in its effect on the design of a tail rotor drive system.
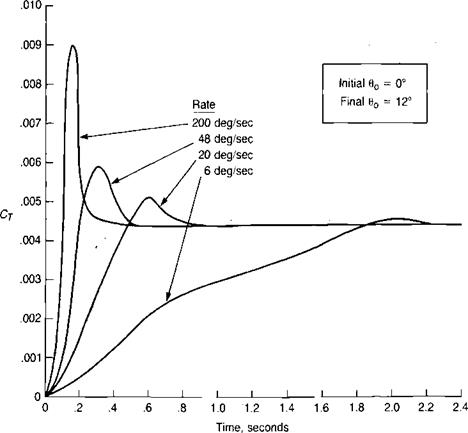
The phenomenon may be illustrated by visualizing a rotor with untwisted blades on a whirl tower at full rotor speed and flat pitch. If the collective pitch is suddenly increased to 10°, the angle of attack of each blade element will instantaneously be 10° and then will decrease as the equilibrium-induced flow pattern is established. Figure 2.15 taken from reference 2.15, shows the measured thrust coefficient of a 33-foot-diameter rotor on a whirl tower for several rates of collective pitch inputs. It may be seen that for very rapid increases, a transient thrust overshoot to twice the final steady value is possible. Not only does the thrust have an overshoot but the torque may also; especially if the transient angles of attack produce stall.
For the main rotor, the transient increase in torque required may exceed that available from the engine and the rotor will slow down, the extra power required being produced by the loss in rotational kinetic energy. Such a decrease is usually safe unless the rotor slows to a point where it can no longer produce the required
|
FIGURE 2.15 Effect of Rapid Pitch Change on Rotor Thrust |
Source: Carpenter & Fridovich, “Effect of a Rapid Blade-Pitch Increase on the Thrust and Induced-Velocity Response of a Full-Scale Helicopter Rotor,” NACA TN 3044, 1953.
thrust. The situation is different for a tail rotor, however. The transient increase in torque is small compared with the total inertia of the rotating system so that little or no slowing takes place and the tail rotor simply demands whatever torque is required from its drive system. This torque may be several times the maximum steady torque which might reasonably be used in the design of the tail rotor drive system. The most critical flight maneuver is stopping a turn over a spot in the torque direction (analogous to vertical descent of the main rotor) with full opposite pedal. For this case, the instantaneous change in angle of attack may be as much as 30° which will insure fully stalled blades and a correspondingly high torque requirement compared with normal flight. In lieu of designing the tail rotor drive system to take this abnormally high torque, the current practice is to design for some more moderate loading—for example, twice the maximum hover torque—and then to ask the pilots to refrain from extreme turn-reversal maneuvers. In some cases, helicopters have been equipped with dampers on the rudder pedals to make it difficult for the pilot to apply sudden pitch changes.
EXAMPLE HELICOPTER CALCULATIONS
![]()
![]() Power required in vertical climb Rate of descent for maximum roughness Rate of descent in vertical autorotation
Power required in vertical climb Rate of descent for maximum roughness Rate of descent in vertical autorotation
HOW TO’s
The following items can be evaluated by the methods in this chapter.
Collective pitch in vertical autorotation Extra power required for vertical climb Induced velocity in climb Induced velocity in windmill brake state Induced velocity distribution in vertical climb Region of power settling
Speed for maximum roughness in vortex ring state Rotor thrust damping Rate of descent in vertical autorotation