Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




Flying qualities parameters need to be physically meaningful and measurable. Assembled together as a requirement specification, they need to embrace the CACTUS rules (Ref. 2.35) outlined later in Chapter 6. Also in Chapter 6, the range of different criteria and the measurement of associated parameters in flight and simulation will be critically reviewed in the light of these underlying requirements. It needs to be re-emphasized that in most functional roles today, both military and civil helicopters need some form of artificial stability and control augmentation to achieve Level 1 flying qualities, which therefore become important drivers for both bare-airframe and automatic flight control system (AFCS) design. Before exploring the scope for artificial augmentation on this Tour, it is worth illustrating just how, in a demanding and fully attentive flying task, an MTE, flying qualities deficiencies can lead to reduced task performance and increased pilot workload.
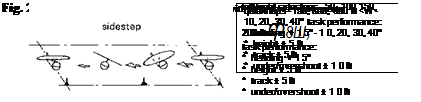 |
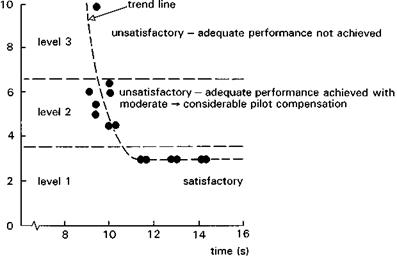
Test techniques for the demonstration of flying qualities compliance need to exercise the aircraft to the limits of its performance. Figure 2.42 illustrates two NoE, hover to hover, repositioning manoeuvres: the quickhop and the sidestep. Tests conducted at the DRA Bedford in the mid-1980s demonstrated the importance of the task urgency or aggression factor (Ref. 2.36) on pilot workload and task performance. The manoeuvres were flown at increasing levels of aggression until the shortest possible task time was achieved. Start and finish position constraints, together with a height/track corridor, defined the acceptable flight path. Performance was increased by increasing the initial pitch or roll angle, to develop the maximum translational acceleration; both test aircraft, Lynx and Puma, were operated at relatively low weights allowing for accelerations over the ground of greater than 0.8 g (~40° roll/pitch) corresponding to a hover thrust margin of about 30%. Figure 2.43 shows the recorded pilot HQRs as a function of task time for a Puma flying a 200-ft (60 m) sidestep. Above 11 s the pilot returned marginal Level 1 ratings; any reduction in task time below this resulted
|
Fig. 2.43 Variations of pilot HQRs with task time for Puma 200-ft sidestep |
in increasing workload. In fact, the pilot was unable to reduce the task time below 9 s and still achieve the flight path performance requirements. On one occasion the wheels hit the ground during the final recover to the hover; the pilot was applying full lateral cyclic, collective and pedal control, but, as a result of the roll and engine/rotorspeed governor response characteristics, the manoeuvre was not arrested in time. The low kinetic energy of the aircraft meant that no structural damage was incurred, but the pilot judged that he was ‘out of control’ and returned an HQR of 10 (Fig. 2.43).