Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




![]()
|
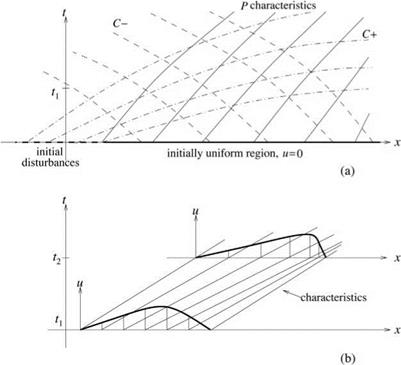
Now consider the problem of acoustic waves propagating into a region initially at rest; i. e., t = 0, u = 0, p = p0, a = a0. Without loss of generality, it will be assumed that the waves propagate in the positive x direction. Since this region is covered by the P characteristics that start out from the same initially undisturbed region (see Figure 8.1), the isentropic relation
|
|||
|
|
||
|
|||
|
|||
holds throughout the region. The same is true with the C characteristics. By eliminating dp/pa from Eqs. (8.7) and (8.8), it is found that
|
|
Upon integrating Eq. (8.9) and noting that the constant of integration is the same for all points in the region, the following integral relation is obtained:
![]() 2a 2a0
2a 2a0
— u = – Y — 1 Y — 1
Now, in the region of the x — t plane covered by both the P and C— characteristics starting from the initially uniform region, Eq. (8.2) may be cast into the following form, by means of the relation (8.7) of the C characteristics:
![]() + (u + a) — 0.
+ (u + a) — 0.
9 x
Finally, by combining Eqs. (8.10) and (8.11), it is easy to derive the nonlinear simple wave equation as follows:
|
|
|
|
|
|
Eq. (8.12) is a nonlinear first-order partial differential equation for u. The characteristic system of this equation is
dx y +1
![]() —— = «0 +– ~— u
—— = «0 +– ~— u
dt 0
![]() du 0 dt
du 0 dt
The two equations of (8.13) can be integrated easily. Suppose the initial condition is
t = 0, u = <h(x). (8.14)
The integral of the second equation of (8.13) satisfying the initial condition is
t = 0, x = s, u = Ф(5). (8.15)
This means that u is a constant along a characteristic. Because u is a constant along a characteristic, the right side of the first equation of (8.13) is a constant. The integral of this equation is
x = s + ^a0 +Y 2 1 Ф^)^ t. (8.16)
The solution of the nonlinear simple wave equation (8.12) and initial condition (8.14) may now be found by eliminating the parameter s from Eqs. (8.15) and (8.16). Eq. (8.16) indicates that the characteristics are straight lines in the x – t plane. The slopes of the characteristics, however, depend on Ф^). If Ф^) is not a constant, the slope of the characteristics will vary from characteristic to characteristic (see Figure 8.1b). Note that adjacent straight lines that are not parallel but convergent will eventually intersect each other. Therefore, over a sufficiently long period of time, the characteristics of Eq. (8.16) will overlap each other. When this happens, the solution will become multivalued. To render the solution single-valued, a discontinuity or a shock must be inserted into the solution. In this chapter, shock-capturing computation using the dispersion-relation-preserving (DRP) scheme is considered.
|
8.1 Nonlinear Simple Waves |
|
One-dimensional acoustic waves are governed by the continuity, momentum (inviscid), and energy equations. They can be written in the following form: |
|
dp dp du dt dx H 9 x 9 u 9 u 1 9 p + u + — 0 dt dx p dx 9p 9p du — + u— + у p— — 0. dt dx dx |
|
(8.1) (8.2) (8.3) |
|
It is well-known that the above first-order system has three characteristics: the P, the C+, and the C characteristics (see Appendix C for derivation). |
|
8.1.1 The P Characteristic Along the P characteristic |
|
(8.4) (8.5) |
|
8.1.2 The C+ and C – Characteristic Along these characteristics, |
|
dx — u ± a, dt |
|
(8.6) |
|
where a — (yp/p)2 is the speed of sound, the dependent variables are related by |
|
pa |