Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




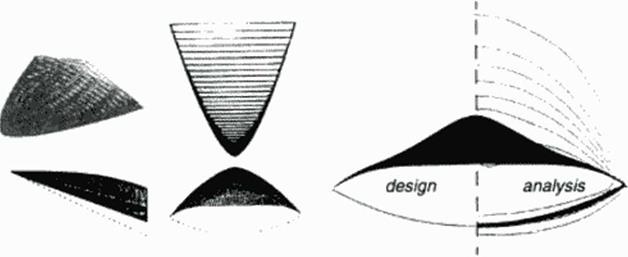
The OC wavender design method has proven to be extremely useful for practical design tasks so far. but further generalizations seem worthwhile for curved bow shock waves: a replacement of conical flow by an axisymmetnc base solution resulting from the 2D inverse method of characteristics may give waveriders with better volumetric efficiency because the convex shock shapes to be prescribed as illustrated in Figure 48 (c) result rather from blunter ogive – shaped forcbodies than from cones.
Inverse solution to the 3D Euler equations with the SCIEMAP code
A 3D arbitrary but analytically controlled oblique shock wave requires an even more general approach: a marching procedure toward the contour surface to be found has to be applied. An inverse solution to the Euler equations results from such an approach. After some first results 1100] conlirming the concept, a numerically more advanced treatment taking into account the *caveats’ postulated in a previous paragraph led to an inverse Euler solver ‘SCIEMAP – Supersonic Cross-stream Inverse Euler MArching Program’ (III].
|
Figure 52 SCIEMAP – designed Wave rider with variable strength shock wave; CFD in viscid analysts (code: F3D), verification of the shock wave geometry. |
The 5 equations of motion (continuity, energy and 3 momentum equations) plus 10 equations for the expansion of the 3D flow gradients on the post-shock wave front w ith its given geometry and 5 primitive variables resulting from the Rankinc – Hugomot oblique shock relations give a system of equations for the 3D gradient vector of the primitive variables. This is suitably used in a local domain marching grid observing the constraints and limitations given by the caveats. Some promising configuration studies have been carried out (111]. (112|; an example is illustrated in Figure 52. This method has the potential to be applied to other problems
where an inverse solution to the compressible steady flow Euler equations seems promising.
8.2 Conclusion
Two inverse design methods have been presented here to obtain supersonic and hypersonic wa- vender shapes with geometnes more general than available from previously used known flow fields: The Osculating Cones (OC) concept is realized in the WIPAR computer code and the inverse integration of the 3D Euler equations from prescribed shock surfaces is performed with the SC1EMAP code.
In the first approach use is made of axisymmctric flows to construct flows with more general shock wave shapes (slope surfaces), but still constant shock strength. The WIPAR software is an interactive computer program for graphic workstations and allows for a flexible parameterized input of the basic aerodynamic and geometric parameters of wavender wings, like the design Mach number, shock angle and planform geometry. Applications have been carried out adding extensions for viscous flow and thermal load. Case studies making use of the OC concept serve as test cases for optimization strategics and propulsion integration.
In the inverse Euler design approach, cross-marching is an exact method of characteristics for inverse 2D and axisymmctric calculations but mathematically ill-posed in general 3D flow modelling; nevertheless it is used successfully to create wavender shapes with more general shock shapes of varying strength. The new numerical marching technique makes use of some features of characteristic cross-marching, results were obtained confirming shapes known from other methods and also completely new with improved volumetric efficiency’.
Comparing both inverse methods, each approach has its merit: While SCIEMAP may he used for more general fluid mechanic modelling requinng solution to an inverse problem and the wavenders created may have better volumetric efficiency, the use of the WIPAR software enables the designer to comfortably create shapes containing various geometric details similar to a configuration generator for general purpose, as being outlined in the next book chapter.