Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




A non-model-based approach for sensor fault detection, isolation, and accommodation is shown in Figure 8.12. The scheme uses the ANFIS system. The MATLAB – based functions ‘‘GENFIS’’ and ‘‘ANFIS’’ (adaptive neurofuzzy inference system) can be used to build the state observers to estimate the state pertaining to the longitudinal motion of aircraft considered. The first part consists of the state observer for each measurement channel for fault detection and isolation [12]. Each observer is trained using (uc) as the control input and measurement (e. g., pitch rate) and the corresponding true state as the output. For the purpose of detection, thresholds are computed using Monte Carlo simulation of random noises (one can use 1000 runs). The second part is for fault reconfiguration, and one can use four observers with each one trained using (uc) as the control input, the measurements from three channels (excluding a channel for which the state is estimated), and the estimated state corresponding to the measurement of the excluded channel as the output. For example, for faulty pitch rate (q) accommodation, inputs to observer are uc, w, u, and U.
 |
FIGURE 8.17 Comparison of states of unimpaired, impaired, and reconfigured states of an aircraft.
Example 8.7
 |
Realize the non-model-based sensor fault detection scheme of Figure 8.18 in MATLAB based on the foregoing theory. Use the same state-space models used in Examples 8.5 and 8.6.
|
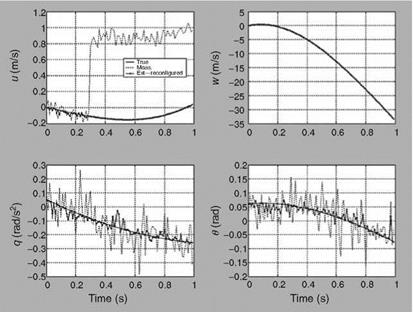
FIGURE 8.19 Comparison of true, measured, estimated state (reconfigured). |
Solution
The simulation is carried out as per Example 8.5 (ExampleSolSW/Example8.7ANFIS). The minimum and maximum values of the noises were computed for each run and then the averaged value of all the runs was considered as the threshold for the purpose of detection. The sensor fault is introduced only to forward velocity u at the 31st data point by adding a constant bias of 4 m/s. The fault was detected around the 32nd data point and most of the time the fault was in the first channel. In between it went to other values but only for a single time-point and the reason for this could be a false alarm. Figure 8.19 illustrates reconfigured estimated states compared with measured (including faulty u), true, and reconfigured estimate states. In the case of faulty measurement, it is observed that, overall, the estimated value closely matches with true except at some points where the scheme is affected, perhaps due to a false alarm. Figure 8.20 shows the residuals compared with the threshold used in fault detection and isolation for each channel.
It is observed for faulty channel (i. e., u) that after reconfiguration the error lies within the threshold.
EPILOGUE
In this chapter and Appendix C, we have introduced some fundamental aspects that are important for design and analysis of flight control and reconfiguration control systems. The subject of design of flight control laws is highly specialized; hence it is not treated here. It would need a separate volume in its own right. Robustness issues, feedback properties, and classical and modern synthesis for multivariable feedback control design are surveyed in Refs. [13-15]. Evaluation of flight-control systems
using the stability margins and low-order equivalent systems is discussed in Ref. [16]. Applications of ANNs and artificial intelligence to sensor fault management, restructurable control systems, and decision and control are dealt with in Refs. [17-19]. In Ref. [20], the authors develop physical insights into the relation between the singular values and the aircraft and controller dynamics by using the literal approximate factors and provide a procedure for the determination of the most important parameter uncertainties for aircraft and controllers. The idea is to obtain approximate relations for transfer function poles and zeros literally in terms of the stability and control derivatives of the atmospheric vehicle. In Ref. [21] the authors deal with the application of online parameter estimation for a restructurable control system. In Ref. [22], the authors discuss the issues and applications of evolutionary algorithms and hybrid neural and fuzzy control schemes.