Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




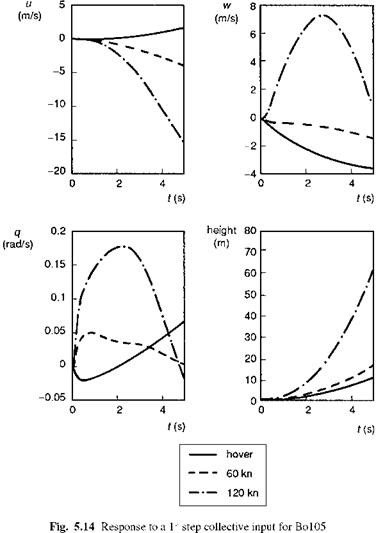
The response to collective in forward flight is considerably more complicated than in hover. While collective pitch remains the principal control for vertical velocity and flight path angle up to moderate forward speed, pilots normally use a combination of collective and cyclic to achieve transient flight path changes in high-speed flight. Also, collective pitch induces powerful pitch and roll moments in forward flight. Figure 5.14
|
|
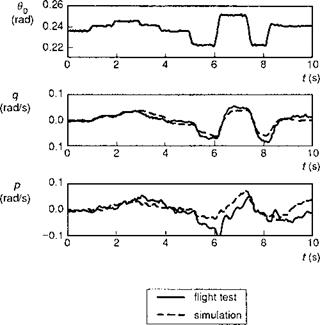
compares the longitudinal response of the Helisim Bo105 to collective steps in hover, at 60 and 120 knots. Comparisons are made between perturbations in forward velocity u, heave velocity w, pitch rate q and height h. We draw particular attention to the comparison of the w – velocity component and the relationship with climb rate. In hover, the aircraft reaches its steady rate of climb of about 4 m/s (750 ft/min) in about 5 s. At 120 knots the heave velocity component is initially negative, but almost immediately reverses and increases to about 7 m/s in only 3 s. The height response shows that the aircraft has achieved a climb rate of 20 m/s (approx. 3800 ft/min) after about 4 s. The powerful pitching moment generated by the collective input (M$0), together with the pitch instability (Mw), has caused the aircraft to zoom climb, achieving a pitch rate of about 10°/s after only 2 s. Thus, the aircraft climbs while the heave velocity (climb rate, V9) increases positively. The pitching response due to collective is well predicted by our Level 1 Helisim model as shown in Fig. 5.15, which compares flight and simulation for
|
Fig. 5.15 Response to a 3211 collective input for Bo105 at 80 knots: comparison of flight and simulation |
the Bo105 excited by a collective (modified) 3211 input at 80 knots. The 3211 test input, in standard and modified forms, was developed by the DLR (Ref. 5.14) as a general – purpose test input with a wide frequency range and good return to trim properties. Figure 5.15 compares the pitch and roll response to the collective disturbance. Roll response is less well predicted than pitch, with the simulated amplitude only 50% of the flight measurement, although the trends are correct. The roll response will be largely affected by the change in main rotor incidence in the longitudinal plane, caused by elastic coning, pitch rate and non-uniform inflow effects; the Helisim rigid blade approximation will not, of course, simulate the curvature of the blade.