Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




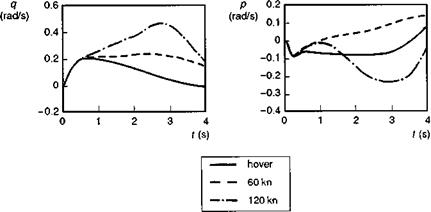
One of the characteristics of helicopters is the widely varying response characteristics as a function of forward speed. Since aircraft attitude essentially defines the direction of the rotor thrust, flight path control effectiveness also varies with speed. This adds to pilot workload especially during manoeuvres involving large speed changes. We choose the attitude response to longitudinal cyclic to illustrate the various effects. Figure 5.21 compares the pitch and roll rate response to a step cyclic input from three different trimmed flight conditions – hover, 60 and 120 knots. We have already discussed the features of the step response from hover. At 60 knots, the pitch response is almost pure rate, sustained for more than 3 s. At 120 knots, the pitch rate continues to increase after the initial transient due to the control input. This continued pitch-up is essentially caused by the strongly positive pitching moment with incidence (Mw) on the Bo105. The pitch motion eventually subsides as the speed decreases under the influence of the very high nose-up pitch attitude in this zoom climb manoeuvre. The coupled roll
|
Fig. 5.21 Variation of response characteristics with forward speed |
response has developed a new character at the high-speed condition, where the yaw response of the aircraft begins to have a stronger influence. The rotor torque decreases as the aircraft pitches up giving rise to a nose left sideslip, exposing the rotor to a powerful dihedral effect rolling the aircraft to port, and initiating the transient motion in the Dutch roll mode. Clearly, the pilot cannot fly by cyclic alone.