Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




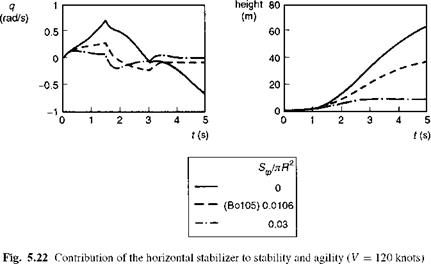
We have already seen in Figs 5.18 and 5.19 how effective the hingeless rotor can be in rolling the aircraft rapidly. This high level of controllability also applies to the pitch axis, although the accelerations are scaled down by the higher moment of inertia. Hingeless rotor helicopters are often described as agile because of their crisp attitude response characteristics. In Chapter 4 this point was emphasized by the relative magnitude of the control and damping derivatives of helicopters with different flap retention systems. We also examined stability in Chapter 4 and noted the significant decrease in longitudinal stability for hingeless rotor helicopters because of the positive pitch moment with incidence. For hingeless rotor helicopters, stability and agility clearly conflict. One of the natural ways of augmenting longitudinal stability is by increasing the tailplane effectiveness, normally achieved through an increase in tail area. The effects of tailplane size on agility and stability are illustrated by the results in Fig. 5.22 and Table 5.3. Three cases are compared, first with the tailplane removed altogether, second with the nominal Bo105 tail size of about 1% of the rotor disc area and third with the tail area increased threefold. The time responses shown in Fig. 5.22 are the fuselage pitch rate and vertical displacement following a step input of about 1° in longitudinal cyclic from straight and level trimmed flight at 120 knots. In Table 5.3 the principal aerodynamic pitching moment derivatives and eigenvalues of short-term pitch modes for the three configurations are compared. The pitch damping varies by about 10-20% from the standard Bo105 while the static stability changes by several hundred per cent.
If we measure agility in terms of the height of obstacle that can be cleared in a given time, the no-tailplane case is considerably more agile. This configuration is also very unstable, however, with a time-to-double amplitude of less than 1 s. Although not
|
|
shown in Fig. 5.22, in clearing a 50-m obstacle, the tailless aircraft has decelerated almost to the hover and rolled over by about 60° only 4 s into the manoeuvre. Pilot control activity to compensate for these transients would be extensive. At the other extreme, the large tail aircraft is stable with a crisp pitch rate response, but only manages to pop up by about 10 m in the same time. To achieve the same flight path (height) change as that of the tailless aircraft would require a control input about four times as large; put simply, the price of increased stability is less agility, the tailplane introducing a powerful stabilizing stiffness (Mw) and damping (Mq). One way to circumvent this dichotomy is to use a moving tailplane, providing stability against atmospheric disturbances and agility in response to pilot control inputs.