Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




It would not be an exaggeration to say that handling qualities research, for both fixed – and rotary-wing aircraft, has concentrated on the short-term response to control inputs, and the roll and pitch axes have absorbed most of the efforts within this research. The primary piloting task under consideration in this region is attitude regulation,
|
|
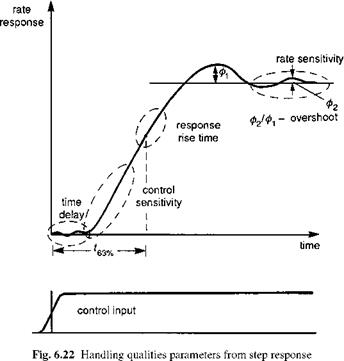
appropriate to tracking tasks when fine attitude corrections are required to maintain a precise flight trajectory or position. Most of the early work aimed at defining quality in this region focused on the response to step control inputs. Figure 6.22 illustrates the key characteristics associated with the step response:
(1) control sensitivity – the initial angular acceleration per unit of control input (e. g., inch of stick travel);
(2) rate sensitivity – the final steady-state rate per unit of control input; more generally this would be called response sensitivity to account for other response types;
(3) response time constant(s) – the time(s) to some proportion of the steady-state response; for simple first-order systems, the time constant t63% is sufficient to characterize the simple exponential growth;
(4) time delay – delay before there is a measurable aircraft response; this can be grouped into category (3) but we separate it because of its special meaning;
(5) overshoot – ratio of successive peaks in oscillatory time response.
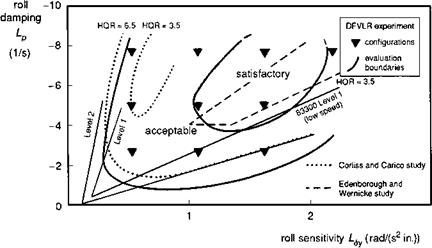
This list suggests that there needs to be at least five, and perhaps even more, handling qualities parameters that characterize the rise times, sensitivities and damping of the step control response in the time domain. Before we discuss the appropriateness of this further, it is worth reviewing one particular criterion that had gained widespread acceptance, prior to the publication of ADS-33 – the so-called damping/sensitivity diagram (Fig. 6.23). The damping derivative Lp(1/s) is plotted against the control sensitivity derivative Lgy (rad/(s2 in)), where Sy is the lateral cyclic stick displacement. The use of derivatives in this criteria format stems from the assumption of a linear
|
Fig. 6.23 Short-term roll handling qualities – damping/sensitivity boundaries (Ref. 6.20) |
first-order type response where these two parameters completely describe the time response characteristics (Lp is the inverse of t63%, and L$y is the initial acceleration of the step response function; the ratio of control sensitivity to damping gives the rate sensitivity). On Fig. 6.23, taken from Ref. 6.20, we have drawn the various boundaries set by data from previous experiments. While we have to recognize that boundary lines on this two-parameter handling qualities chart will be task dependent, there is good reason to believe that the wide spread of quality boundaries in Fig. 6.23 is actually a signal that the criteria are not appropriate to short-term response criteria in general. For simple first-order systems, or classical roll rate response types easily modelled in simulation, the contour shapes in the figure will be entirely appropriate. However, there are two principal reasons why Fig. 6.23 is not generally applicable and hence the situation does not meet the CACTUS rules:
(1) Short-term helicopter roll response is typically non-classical, with higher order dynamics distorting the first-order contributions.
(2) For tasks requiring the pilot to perform attitude regulation, there is strong evidence that the pilot’s impression of handling qualities is not particularly sensitive to the shape of the response to a step input.
With regard to the first point, in the early unpublished versions of the revision to MIL-H-8501, time domain step response criteria were proposed, based on fixed-wing experience, which included three rise time parameters and one overshoot parameter as shown in Table 6.2.
This criteria set was based entirely on flight data, largely gathered on the variable stability Bell 205 operated by the Flight Research Laboratory in Ottawa; ground-based simulator results were discounted because there were too many unresolved questions about data from rate response types obtained from simulation. Reference 6.21, in summarizing the contribution of the Canadian Flight Research Laboratory to the ADS – 33 effort, presents results showing the discrepancy between ground-based simulation and in-flight simulation results; the ground-based tests showed no significant Level 1
|
Table 6.2 Limiting values of time response parameters for roll rate response type in hover and low speed MTEs
|
achievement. The proposed time domain parameters in Table 6.2 were derived from the limited flight test results available at the time. The criteria proposed for attitude command systems required the rise times to be a function of the effective damping ratio of the response, and were therefore even more complicated. The emphasis on finding suitable time domain criteria for both roll and pitch attitude short-term response was partly driven by the helicopter community’s familiarity with this format, stemming partly from the history of usage of MIL-H-8501A and the traditional damping/sensitivity two-parameter handling qualities diagram. Had there not been a potentially very effective alternative being developed in parallel with the time domain parameters, the ADS-33 development may well have persisted with this kind of format.
Measurement problems aside (and these are potentially significant), the reality is that, although the step response function may be a simple clinical concept, pilots rarely use step response control strategies in attitude regulation and tracking tasks, and it was only a matter of time before the community became convincingly won over to the frequency domain and the alternate proposal – the bandwidth criterion. Before discussing bandwidth in some detail it is worth saying a few words about the archetypal frequency domain approach – low-order equivalent systems (LOES), used extensively in fixed-wing handling criteria (Ref. 6.6). The argument goes that the higher frequency ranges of vehicle dynamics characterizing the short-term responses are dominated by the roll subsidence and short-period pitch modes. Obtaining frequency response data, by exciting the aircraft around the natural frequencies, provides amplitude and phase characteristics to which low-order equivalent systems can be fitted numerically to estimate natural frequency and damping, for which quality boundaries can be defined on two-parameter diagrams. The fixed-wing handling requirements state that this approach is not applicable to non-classical response types and offer the bandwidth criterion as an alternate approach in these cases. It was recognized early on in the development effort that the naturally non-classical behaviour of helicopters would exclude LOES as a general candidate for roll and pitch response (Ref. 6.22), particularly for Level 2 and 3 configurations, and little research has been conducted in this area, at least for roll response.