Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




Heave, or vertical, axis handling qualities criteria are concerned principally with the response of the aircraft to collective pitch application. In hover and low-speed flight, collective provides the pilot with direct lift control, a feature that clearly makes the helicopter almost unique. In forward flight, control of the aircraft’s flight path can be achieved through a combination of collective and cyclic, but in this section we shall restrict the discussion to the response to collective control. The extent to which the pilot is able to exercise this degree of freedom depends on a number of factors, which we shall discuss, but is often dominated by the thrust margin available before transmission torque, rotorspeed or engine limits are exceeded. The thrust margin is a strong function of airspeed through the variation of the power required in trimmed flight; this point has been discussed earlier in the modelling chapters of this book, but it is worth recalling the shape of the power required curve given in Fig. 4.11. Typically, for a fully laden helicopter at its mission weight, the power margin at hover is very low, of the order of 5-10%, giving thrust margins between 3 and 7%. At minimum power speed, the same helicopter may have more than a 100% thrust margin, enabling the aircraft to sustain a 2 g turn. Other fundamental response parameters are the heave damping and control sensitivity derivatives. Again, both vary significantly with forward speed. These aerodynamic effects are a reflection of the increasing efficiency of the rotor as a lifting device through to the mid-speed range. As speed is further increased, the power required increases again and the response derivatives level off to their maximum values as the aerodynamic lift becomes dissipated in higher harmonic loadings that contribute nothing to flight path response. Unlike roll response characteristics, the heave dynamic characteristics therefore vary significantly with forward speed. The pilot is able to exploit these varying characteristics in different ways, and we must expect the associated handling criteria to reflect this.
hover points 9ate
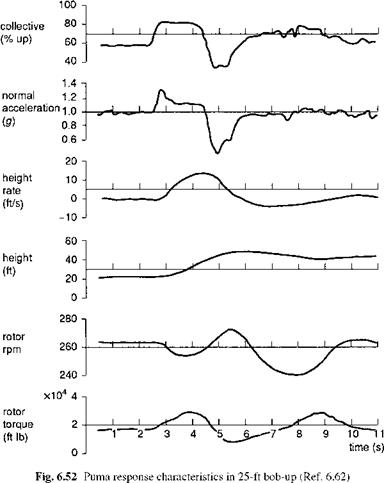
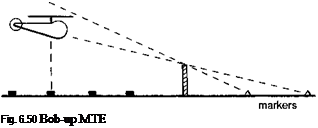 The low-speed vertical axis response characteristics are highlighted in the bob-up task, a vertical unmask manoeuvre illustrated in Fig. 6.50. Results from DRA tests with the research Puma are shown in Figs. 6.51 and 6.52; the pilot’s task was to climb with maximum power from the low hover position and to re-establish a hover when the ground markers were lined up with the top of the gate (Ref. 6.65). Height responses are shown in Fig. 6.51 for bob-up heights from 25 to 80 ft together with the case of a maximum power vertical climb, when the climb rate exceeded 30 ft/s (10 m/s). In comparison, the maximum rate achieved during the 25-ft bob-up was only 14 ft/s. This result is a function of the vertical damping of the rotor, which gives an effective time
The low-speed vertical axis response characteristics are highlighted in the bob-up task, a vertical unmask manoeuvre illustrated in Fig. 6.50. Results from DRA tests with the research Puma are shown in Figs. 6.51 and 6.52; the pilot’s task was to climb with maximum power from the low hover position and to re-establish a hover when the ground markers were lined up with the top of the gate (Ref. 6.65). Height responses are shown in Fig. 6.51 for bob-up heights from 25 to 80 ft together with the case of a maximum power vertical climb, when the climb rate exceeded 30 ft/s (10 m/s). In comparison, the maximum rate achieved during the 25-ft bob-up was only 14 ft/s. This result is a function of the vertical damping of the rotor, which gives an effective time
time (s)
|
|
constant of several seconds, together with the constraint on the pilot to respect the Puma’s collective pitch limits. Figure 6.52 shows the variation with time of selected variables during a 25-ft (7.5 m) bob-up. Thepilotpulls in a 20% collective input, causing a sharp rise in normal acceleration. The overshoot in the time history of normal g is explained by the delay in build up of the induced inflow, described in Chapters 3 and 5. A thrust margin of about 15% is sustained for about 1 s before the pilot lowers the collective by more than 40% and almost immediately pulls in power again to arrest the deceleration and level out at the top of the bob-up. The manoeuvre is relatively simple but has required the pilot to apply large control inputs in three phases. The lower traces in Fig. 6.52 show the excursions of rotor rpm and torque. The lower rotor rpm limit of 240 rpm is actually reached during the settling phase at the top of the bob-up. The need to respect rotor collective, torque and rpm limits plays a significant role in pilot subjective opinion of vertical axis handling qualities. This has been exposed in most of the flight and ground-based simulation work supporting the development of associated criteria, and we shall return to this aspect later in this section and in Chapter 7.
|
Fig. 6.53 Puma height quickness in bob-up task |
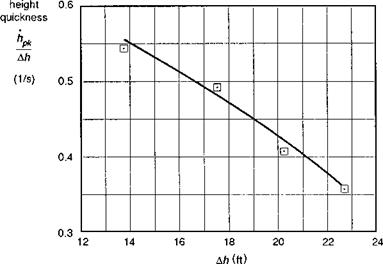
Height quickness results derived from the Puma tests are shown in Fig. 6.53 and highlight the much lower values than those found for attitude response, even though the bob-up has been quickened by the pilot through the application of a collective doublet. Control of helicopter vertical motion is generally regarded as a relatively low-gain task for pilots, and criteria developments have been limited to fairly simple formats that apply across the frequency range. The RAE Puma tests referred to above were one of a series conducted during the early – to mid-1980s to develop new heave handling criteria for rotorcraft (Refs 6.65-6.68), building on previous work applied to VSTOL aircraft, with particular emphasis on hover and low speed. Flight path control in forward flight will be discussed later in this section.