Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




Flight in conditions of steep descent presents particular dangers for helicopters. It is generally avoided by pilots but the continuing occurrence of accidents and incidents in this flight regime indicates that it is both operationally useful (e. g., positioning underslung loads) and easy to encroach inadvertently. In Chapter 5 we saw that the response to collective pitch at steep angles of descent can reverse, and so increased collective is required to descend more rapidly. Under controlled or directed conditions, this feature can be contained by a pilot, but in other conditions it can easily give rise to serious handling deficiencies. In Chapters 4 and 5 we discussed the problem of power settling, when the flight path steepens in response to an increase in collective. In Ref. 6.64 Heyson presents a useful theoretical analysis of the problem; the reader is referred to Fig. 4.12 where the power requirements in steep descent are illustrated. Heyson also comments on the operational implications of power settling – to quote from Ref. 6.64.
Operationally, the appearance of the phenomenon is rapid and usually unexpected. Pilots sometimes refer to it as ‘stepping in the sinkhole’. The particular problem is that the pilot has no means of determining his aerodynamic flightpath. He may successfully negotiate a combination of geometric glide slope and speed so many times that he is confident of its safety; however, the next approach may encounter winds that produce disastrous consequences.
A similar sequence of events can be encountered even without a tailwind. If any disturbance increases the speed along the glide slope, the instinctive reaction of a pilot is to correct the airspeed by pulling back on the cyclic-pitch stick to increase the rotor inclination. If the original stabilised glide slope was near a minimum power condition, comparison of the various parts of Fig. 12 shows that such a rearward stick movement may result in a power requirement far in excess of that available in the helicopter.
The operational significance of this effect is that pilots should be specifically cautioned against any large or rapid rearward stick motions while in steep descents.
Any recovery from power settling is likely to result in a significant loss in altitude. Thus, the safest procedure is to fly so as to avoid power settling at all times.
Power settling and the associated nonlinear flight path response to controls occurs in steep descent ( >60°) in the speed range of about one to two times the hover induced velocity (20-50 knots, depending on rotor disc loading). At much lower rates of descent and in near-vertical descent, a helicopter can enter a potentially hazardous flight state where high rates of descent can build up rapidly and erratic pitch androll oscillations can develop. In addition, control effectiveness can change markedly, particularly collective control, with normal recovery techniques seeming only to exacerbate the situation. Analogous to the stall in fixed-wing aircraft, at least in terms of the consequences to the flight path trajectory, but quite dissimilar in aerodynamic origin, this so-called vortex-ring condition is definitely a state to avoid, especially at low altitude. Flying
qualities in vortex ring become severely degraded and a pilot’s first consideration should be to fly out of the condition.
The phenomenon has its origin in the peculiar flow characteristics that develop through the rotor in the intermediate range between the helicopter and windmill working states (see Fig. 2.8). At very low flight speeds (< 15 knots) and rates of descent between 500 and 1500 ft/min, depending on the rotor disc. loading, the flow becomes entrained in a toroidal-shaped vortex ring that leads to extensive recirculation in the outer regions of the rotor disc. The vortex ring is very sensitive to small changes in flow direction, and rapid fluctuating asymmetric development of the ring can lead to fierce moments being applied to the fuselage.
The standard recovery technique involves lowering the nose of the aircraft until sufficient speed is gained that the vortex is ‘washed’ away, and then applying collective pitch to cancel the rate of descent. Different aircraft types have their own peculiar characteristics in the vortex-ring state. Early tests conducted at the RAE (Ref. 6.73) produced results that varied from loss of control to mild wallowing instability. In general, the aircrew manual for a type will contain an entry describing any particular features and advising the best recovery procedures. One such manual notes that rates of descent can build up to 6000 ft/min if vortex ring becomes fully established and that ‘the aircraft pitches sharply nose down if rearward flight is attained’. Another refers to ‘an uncontrollable yaw in either direction’ eventually occurring. This same manual adds that ‘any increase in collective pitch during established vortex ring state creates a marked pitching moment and should be avoided’. All such references make it clear that considerable height will be lost if the vortex-ring state is allowed to develop fully before recovery action is taken.
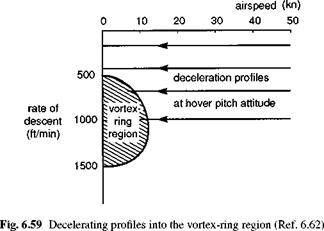
Interest in the effectiveness of collective control during recovery prompted a series of trials being carried out by the author at RAE Bedford using Wessex 2 and Puma helicopters. The tests were qualitative in nature and aimed at exploring the behaviour of these two aircraft in the vortex-ring state and establishing the benefits to recovery profile of increasing collective pitch before the aircraft nose is lowered to gain air-speed. The test technique options for approaching the vortex-ring condition were somewhat constrained by the need to operate well above the ground (minimum height for initiating recovery action, 3000 ft above ground level) and the lack of reliable low airspeed measurement on both aircraft. The procedure adopted involved a deceleration from 50 knots to the hover, maintaining a constant pre-established (hover) attitude and rate of descent. The rate of descent was then increased incrementally until the vortex region was encountered (Fig. 6.59). For both test aircraft the vortex region was quite difficult to find and apparently limited to a range of very low airspeed. With the Wessex, the region was first encountered with the entry profile at 800 ft/min rate of descent. To quote from the pilot’s report (Ref. 6.62)
… with the rate of descent at about 800ft/min we settled into the vortex ring; the rate of descent increased through 2000ft/min in spite of increasing power to 3000ft lb (hover torque reading). The vibration level was marked and a considerable amount of control activity was required to hold the attitude, though the cyclic controls always responded normally. Applying full power produced a rapid reduction of the rate of descent as soon as the rotor moved into clear air.
|
|
first and then increased when airspeed developed, the height loss was about 500 ft. Similar results were found with the Puma, except that the pitching and rolling moments were of higher amplitude and frequency and became more intense as the collective lever was raised during recovery. It is emphasized here that the results discussed above are particular to type, and the beneficial use of collective during recovery may not read across to other aircraft. The difference in height loss during recovery for the two techniques is, however, quite marked and is operationally significant, particularly for low-level sorties. Vortex ring is a real hazard area and can be encountered in a variety of situations, some less obvious than near-vertical descents into restricted landing areas. If a pilot misjudges the wind direction, for example, and inadvertently turns and descends downwind into a landing area, concentrating perhaps more on ground speed than airspeed, then he may fly dangerously close to the vortex-ring condition. The final stages of a quick stop manoeuvre can also take the rotor through the vortex-ring condition as the pilot pulls in power. Such manoeuvres are typically carried out close to the ground and the consequences of a delayed or inappropriate recovery procedure could be serious.
Specific flying qualities criteria for the response characteristics in flight at steep descent angles do not exist, but perhaps the emphasis should be on deriving methods to assist the pilot in respecting the very real limits to safe flight that exist in this flight regime, conferring carefree handling, a topic returned to in Chapter 7.