Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




In the field of fixed-wing aircraft flying qualities, the subject of flight path response has received considerable attention and remains one of the areas of ongoing research and even controversy (Ref. 6.23). Two reasons explain why this level of interest has not carried over to rotary-wing aircraft handling. First, a critical flight phase and MTE for fixed-wing aircraft is the approach and precision flare and landing. The flight path response during the flare is very different for classical aircraft than for highly augmented
|
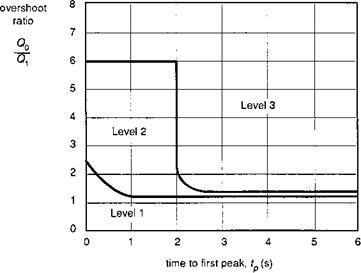
Fig. 6.56 ADS-33C requirements on displayed torque in terms of overshoot rates and time to first peak (Ref. 6.5) |
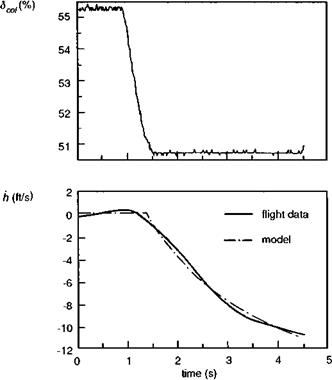
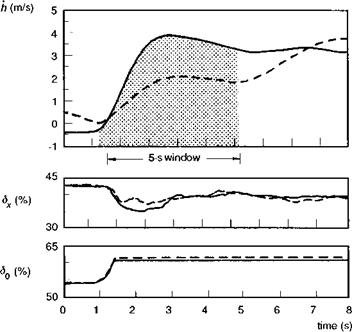
aircraft, and different criteria are required for each, accommodating both attitude and path angle bandwidth requirements. For helicopters, there is no real equivalent MTE, for while guided approaches are common, by the time the helicopter is close to touchdown, the speed will have been reduced to the point that pitch and flight path are independent degrees of freedom. Second, through collective pitch, the helicopter pilot has direct lift or direct flight path control, and can normally use a combination of collective and cyclic to achieve a combination of pitch and flight path angle in forward flight to suit the mission requirements. These two reasons go some way towards explaining why the same level of attention has not been given to rotorcraft; the problems are not the same and the low-speed criteria for rotorcraft are more important. In the absence of a substantial test database, ADS-33 proposed an identical criterion to the one derived for hover and low-speed flight, based on an equivalent first-order system response. In the years since ADS-33 was published, several attempts at using this format have been published. For unaugmented aircraft, the important coupling parameter between pitch and incidence motion is the static stability derivative Mw. For aircraft with close to neutral stability, the pitch and heave motions are uncoupled in the short term and the flight path has a distinct first-order shape. An example of this case is presented for the AH-64A at 130 knots in Ref. 6.72; the time domain fit is shown in Fig. 6.57 and the handling parameters estimated from the first-order fit compare well with stability and control derivatives estimated from test data using six degrees of freedom models. Much poorer results are presented in Refs 6.19 and 6.71. In Ref. 6.19, the corresponding results for the Bo105 at 80 knots are presented. Figure 6.58 shows the height rate response to a step collective input, indicating a non-first-order-like shape in the 5-s window. For the Bo105, the pitch response to a collective step is very strong, causing the speed to reduce and the aircraft flight path to change as the nose pitches up. Applying cyclic to minimize pitch excursions resulted in a first-order height rate response (see full
|
Fig. 6.57 Fit of handling qualities model to step collective response – AH-64 (Ref. 6.72) |
|
|
curve on Fig. 6.58), but the estimated parameters were dependent on the cyclic control strategy. The Bo105 results show clearly that the simple first-order equivalent system is not a consistently good approximation to heave dynamics and needs to be applied with considerable caution. Heave axis handling qualities in forward flight is an area clearly needing more attention.