Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




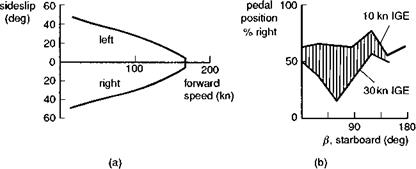
As we turn our attention to the fourth and final axis of control, the reader may find it useful to reflect on the fact that of all the ‘control’ axes available to the pilot, yaw is, arguably, the most complex and the one that defines the greatest extent of the flight envelope boundary, both directly or indirectly. Figures 6.60 (a) and (b), for example, show the SA330 Puma control limits for the forward flight sideslip envelope, bounding the envelope at higher speeds, and for hovering in a wind from the starboard side, bounding the low-speed envelope. Excursions beyond these boundaries can lead to
|
Fig. 6.60 Puma sideslip and sideways flight limits: (a) sideslip envelope in forward flight; pedal margin for hover in wind |
loss of control or structural damage. Within these constraints, the pilot may feel able to command yaw motion in a relatively carefree manner. However, the pilot is not provided with a cue as to the magnitude of the loads in the tail rotor critical components. The tail rotor can absorb up to 30% of the total engine power, and in some flight conditions, tail rotor torque transients can lead to damaging loads. The pilot is also not provided with precise knowledge of sideways velocity or sideslip angle, but will typically fly at low level with primary reference to ground cues, oblivious to velocities relative to the air mass, and relying on tactile cues through control position for information on the proximity to aerodynamic limits. Our discussion suggests that yaw control is far from carefree and any handling deficiencies can contribute significantly to pilot workload for both civil and military operations.
Yaw control functions can be grouped into the following categories:
(1) balance of powerplant torque reaction on the fuselage, in steady state and manoeuvring flight;
(2) control of heading and yaw rate in hover and low-speed flight, giving all-aspect flight capability;
(3) sideslip control in forward flight, giving fuselage pointing capability;
(4) balancing or unbalancing manoeuvres, to increase or decrease turn rate.
Of these, the control functions in category (2) have probably accounted for by far the greatest range of yaw handling problems, stemming largely from the effects of main rotor wake-tail rotor-rear fuselage-empennage interactions (Refs 6.74-6.76).
In ADS-33, criteria for yaw handling are defined in much the same formats as for roll and pitch. These will be reviewed briefly.