Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




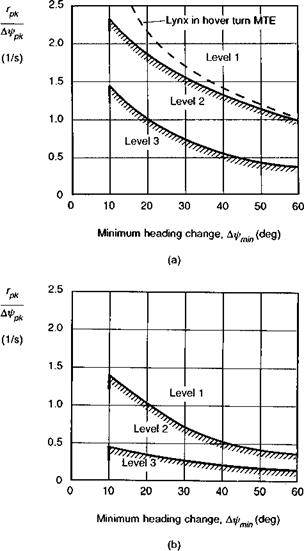
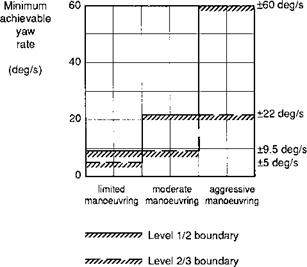
Following the formats adopted for the roll and pitch handling criteria, Fig. 6.61 shows the heading quickness boundaries for hover and low-speed MTEs, and Fig. 6.62 shows the minimum control power requirements for rate response types. It can be seen that the requirements for quickness are as demanding as for roll response, placing a particularly strong emphasis on yaw moment capability. For example, the ability to
|
Fig. 6.61 Yaw axis quickness – hover and low-speed flight (Ref. 6.5): (a) target acquisition and tracking; (b) general MTEs |
achieve a yaw rate of 40°/s in a discrete 20° heading change requires a maximum acceleration of about 2 rad/s2. For an aircraft like Lynx this corresponds to generating a tail rotor thrust perturbation of about 1000 lbf. Overlaid on Fig. 6.61 is the boundary of maximum quickness values measured on Lynx performing precision hover turns, with heading changes from 30° through to 180°. The ADS-33 requirements for target acquisition and tracking are fairly demanding and call for a powerful tail rotor, or fantail in the case of the aircraft for which ADS-33 was developed, the RAH-66. The high quickness levels were partly established through simulation trials conducted on the VMS. Reference 6.77 presents results from simulation trials that included target
|
Fig. 6.62 Minimum yaw control power requirements – rate response type (Ref. 6.5) |
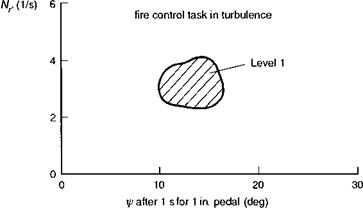
acquisition and tracking MTEs. Experimental variables under investigation included the yaw damping, weathercock stability and response shape. Figure 6.63, taken from Ref. 6.77, shows the apparently very limited region fit for Level 1 handling in air-to-air target engagement, on a damping/response-shape diagram. The high levels of yaw damping required to achieve Level 1 for this kind of operation could not normally be produced without significant artificial response augmentation. Similar results were reported in Ref. 6.78 for forward flight MTEs. The tracking phase of an aerial combat engagement is more concerned with the higher frequency, small amplitude behaviour, and once again, the authors of ADS-33 turned to bandwidth to discern quality.
|
Fig. 6.63 Short-term yaw response requirements in air-to-air tracking task (Ref. 6.77) |