
Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




In this chapter a great play has been made of the concept of dynamic response criteria, used to form the predicted handling qualities, fitting into their place on the frequency – amplitude chart, conceptualized earlier in Figs 6.5 and 6.14. This can be summarized more holistically using Fig. 6.73 where the different criteria can be further classified into two groups – those determining the aircraft’s agility and those determining the aircraft’s stability (Ref. 6.91).
As before, the manoeuvre envelope line is shown to restrict criteria to practical manoeuvres, the achievable manoeuvre amplitude reducing as frequency increases. Within this overall envelope, four areas can be distinguished, two dealing with stability and two dealing with agility. The dynamic response requirements relating to agility and
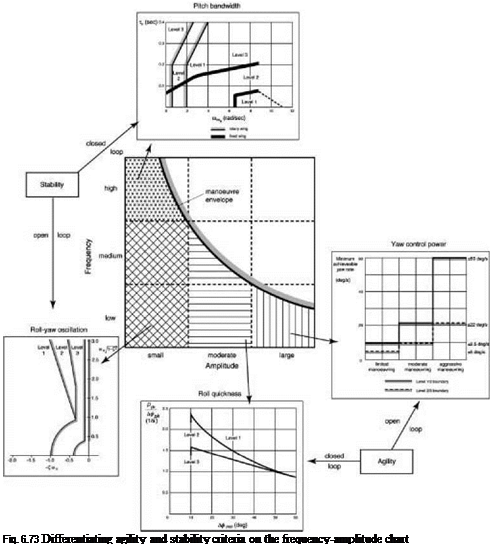
stability cannot easily be ‘divorced’, since too much stability can degrade agility and vice versa. Designing to achieve the right balance requires careful optimization and, as with the design of fixed-wing aircraft, digital fly-by-wire/light flight control technology has provided the designer with considerably more freedom than hitherto in this trade-off. However, it is significantly not essential for control augmentation systems to have full authority over the control actuation to be able to deal with this. The essence of this challenging compromise can be seen in the designs of the augmentation systems on two of the aircraft featured in this book – the Lynx and the Puma. The Lynx system features both pitch-roll attitude and rate feedback signals, but the gain on the attitude signal has two values – a high value for small perturbations and a much reduced value when the attitude increases above certain values. The response type is therefore ACAH
for small amplitude inputs and RC for large amplitude inputs. The increased stability conferred by the attitude feedback also improves the aircraft flying qualities in turbulent conditions where the pilot does not have to apply continuous corrective actions to maintain a desired attitude and speed. In the Puma system, a different approach is used. A pseudo-attitude is derived by integrating the signal from the rate gyro and used to provide short-term attitude stabilization. When the pilot moves the cyclic stick outside a prescribed range from the trim position, the pseudo-attitude component is switched out, providing the pilot with full RC response. Both the Lynx and Puma designs were innovative 40 years ago and specifically designed to address the stability-agility tradeoff; the augmentation on both aircraft acts through limited authority (~ ± 10%) series actuators. Nowadays, task-tailored control and flying qualities are commonplace concepts, although the implementation of such strongly nonlinear design functionality seems to be much less common.
In Fig. 6.73, examples of agility and stability criteria from ADS-33 are shown. The moderate amplitude quickness criteria (shown for the roll axis) provide a direct link between closed-loop stability, encapsulated in the bandwidth criteria (shown for the pitch axis), and the maximum agility, encapsulated in the control power criteria (shown for the yaw axis). The basic stability is defined by the position of the eigenvalues on the complex plane, shown in the figure for the Dutch roll-yaw oscillation. Flying qualities requirements extend far beyond those summarized in Fig. 6.73, of course, including trim and static stability, flight path response, cross-coupling behaviour and controller characteristics, and most of these aspects have been covered to varying extent in this chapter. During the period since the publication of the first edition of Helicopter Flight Dynamics, various basic research and application studies have refined the understanding of helicopter flying/handling qualities and some of this has been embodied in the performance specification version of ADS-33E (Ref. 6.92). The changes from the C – version, used throughout Chapter 6, have been numerous and no attempt has been made to fully revise the material presented earlier. Rather, a number of key developments are highlighted here to draw specific attention to them.
ADS-33 contains the first truly mission-oriented set of requirements, embodied in the fact that the location of criteria boundaries are related to the types of ‘mission – task-element’ to be flown, rather than the aircraft size or weight. In ADS-33E-PRF the aircraft role (i. e., attack, scout, utility, cargo) is then described by a subset of recommended MTEs to be flown and level of agility used (i. e., limited, moderate, aggressive, tracking). The objective criteria then link with the MTEs in two ways – through the Response Type table (see Table 7.4) and also the level of agility associated with an MTE that, in turn, defines the handling qualities boundary to be used. An example from Ref. 6.92 is the set of requirements for large amplitude attitude changes in hover and low-speed flight, i. e., the control power, shown in Table 6.6. The normal levels of agility for the 13 different MTEs that are used to define the control power requirements are defined. For example, slaloms would normally be flown at moderate levels of agility while the acceleration-deceleration would require aggressive agility.
A change to the closed-loop stability requirements appears in the bandwidth for the general or ‘all other’ MTEs in a UCE > 1 and/or divided attention. Figure 6.74 should be compared with Fig. 6.30(c), showing the shift of the Level 2/3 boundary from 0.5 rad/s to 1 rad/s; the boundary is also raised for forward flight. Generally speaking, less research has been conducted to define the Level 2/3 handling qualities boundary than that conducted for the Level 1/2 boundary; it is known that pilot perception of
, faced with such response lags.
The attitude quickness criteria remain as documented in ADS-33C, apart from clarification on the testing requirements, particularly relating to the need for the pilot to change attitude ‘as rapidly as possible without significant reversals in the sign of the cockpit control input’. Control overshoots are known to result in increased quickness and give a ‘false’ sense of agility, even though the pilot might commonly use this technique to change attitude. The point is also emphasized that the full range of moderate amplitudes should be covered. Figures 6.10 and 6.18 showed what we described as closed-loop quickness (pilot using overshoot technique) for the Lynx flying slalom and sidestep MTEs, measured across a wide range of attitude changes. A significant change is that aircraft with response types appropriate to UCE = 2 and 3 no longer have to meet the quickness requirements, on the basis that operations in DVEs require only limited agility.
In Section 6.5.3, discussion centred around the complexities of helicopter flight path control in forward flight and the shortcomings of the requirements of ADS-33C were highlighted, particularly relating to testing difficulties, and the distinctly nonfirst-order response of some types (e. g., see Fig. 6.58). In ADS-33E-PRF, new criteria have been introduced for flight path behaviour in response to a pitch attitude change through cyclic pitch with collective fixed. Criteria are distinguished for front-side and back-side (of the power curve) operations. If Ayss is the change in flight path and AVss is the change in speed resulting from a step change in pitch attitude, then
Front-side operation Ayss/AVss < 0 (6.41)
Back-side operation Ayss/AVss > 0 (6.42)
For back-side operation, the flight path handling requirements are essentially the same as the low-speed height response to collective requirements discussed in Section 6.51, except that the maximum value of the time constant, T^ , for Level 2 handling, is reduced to 10 s. For front-side operation, the criteria is based on the lag between flight path and pitch attitude (equivalent to the heave time constant, or inverse of the derivative — Zw, at low frequency), expressed in the frequency domain as follows: the lag should be <45° at all frequencies below 0.4 rad/s for Level 1, andbelow 0.25 rad/s for Level 2. It is considered that these criteria are still open to development, particularly for complex precision approach trajectories envisaged to enable the expansion of simultaneous, non-interfering operations of helicopter at busy hubs.
Finally, we turn to cross-coupling criteria and Fig. 6.75 summarizes the various important cross-coupling effects found in helicopters. The starred boxes denote response couplings for which no handling criteria exist.
Requirements in ADS-33 include detailed quantitative ratio criteria, for example, the roll to pitch or collective to yaw, and also qualitative ‘not objectionable’ type statements, although the flight path response to pitch attitude changes has been developed in Ref. 6.92 into the quantitative criteria described in the previous paragraph. Crosscouplings emerge as a serious impediment to task performance for manoeuvres where higher levels of precision and aggressiveness are required, and this has been taken into account in Ref. 6.92 by requiring that the coupling requirements on yaw from collective and pitch-roll and roll-pitch be applicable to aircraft that need to meet the aggressive and acquisition/tracking levels of agility. New requirements have been developed for the tracking level of agility based on the research reported in Refs 6.93 and 6.94, which
|
PITCH |
HOLL |
HEAVE |
YAW |
|
|
PITCH |
*W*4 I’haver and 1wd flight) |
ihghl pain reapcmaa not QbjeetfSnalUe in forward Nigh! |
* yaw response due to roior}cirque Changes in aggressive piSch manoeuvres |
|
|
* |
||||
|
ROLL |
Дврк/Дф4 (hover and Iwd Ibght) |
thrust/torque spines In rapid roll reversals |
ЩдФ ratios in forward fligtil |
|
|
* |
||||
|
HEAVE |
(forward 1 ighil |
Дфрк/ДпХрк (hover and iwd ihghl) |
r/h ratios in hover |
|
|
* |
||||
|
YAW |
pitching moments duo to sideslip In forward night |
trihedral effect on rotl control power |
not objectionable in hover |
|
^ no curnem requirement? |
Fig. 6.75 Dynamic response criteria for cross-couplings or off-axis response
identified the frequency dependence of the handling qualities for small amplitude tracking. In Fig. 6.76 the response ratios (average q/p (dB), average p/q (dB)) are derived from the amplitudes of the frequency response functions q/Slat divided by p/Slat and p/&long divided by q/Song, averaged between the attitude bandwidth frequency and frequency at which the attitude response phase is -180°. The requirements focus on the pitch due to roll requirements, derived from tests where pitch control was disrupted by varying levels of coupling during a roll tracking task (Ref. 6.93).
The methodology expressed in ADS-33 has been applied extensively since the publication of the first edition of this book. Some guidance for the tailoring of the requirements to specific roles was given in Ref. 6.95. In the United Kingdom an initial emphasis was placed on the application to the attack helicopter procurement competition (Ref. 6.96), while in mainland Europe to the design and development of the NH90 (Ref. 6.97). A continuing theme in the research community has been the development of a maritime version of ADS-33, with particular application to operations to and from ships. A series of flight and flight simulation trials have been conducted and results reported (Refs 6.98-6.101), which have guided specific applications, but no generally accepted and conclusive product has emerged. What seems to be universally agreed, however, is that (Ref. 6.101) ‘Level 1 handling qualities are not achievable at high sea
Fig. 6.76 Pitch-roll cross-coupling requirements for target acquisition and tracking MTEs states using current landing practices with standard levels of aircraft augmentation’. A somewhat similar situation has arisen with regard to extending the scout/attack helicopter requirements – originally the focus of ADS-33 – to cargo helicopters, particularly for operations with external, underslung loads. References 6.102-6.104 document part of the story, but ultimately ADS-33E-PRF, in its discussion on the flight and simulation tests conducted to develop criteria, concludes that, ‘The outcome of this testing has been overwhelming evidence that quantitative criteria will be extremely difficult to derive’. In Ref. 6.105 a comprehensive analysis of the handling qualities of the UH-60M prior to first flight is reported, demonstrating the utility of the methodology to vehicle upgrades.
The author’s own research has also taken the methodology into new directions, particularly the relationship between handling qualities and loads. In Ref. 6.106, for example, some of the structural fatigue issues in helicopter flight testing are addressed, with particular emphasis to flying qualities tests. In Ref. 6.107 an approach to integrating the handling qualities/agility and load alleviation design processes is presented, taking advantage of and extending the ADS-33 metrics to embrace both disciplines.
Finally, it seems appropriate to briefly mention the main intended recipient of the ADS-33 development efforts, the RAH-66 Comanche. The programme was cancelled on 23 February 2004, but not before the aircraft had demonstrated the fruits of the effort to design and build the first helicopter with Level 1 handling qualities throughout the OFE, at least in the good visual environment (Ref. 6.108). A salutary lesson lies in the conclusions of Ref. 6.108, however, that ‘… while the analytical requirements of ADS-33D, Section 3, are an indispensable resource for control law development, they do not obviate the requirement for a vigorous flight test programme with active engagement between pilot and engineers, without which many of the critical improvements… would not have been possible’. With these words, the authors of Ref. 6.108 lead us naturally to the subject of subjective pilot assessment and the assigned handling qualities.
|


