Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




Digital computers are increasingly being used to implement control systems and for many related studies. Most modern control systems operate in the digital domain. Control system laws are computed via algorithms in a digital computer. One can view the computer-controlled systems as an approximation of analog-control systems.
|
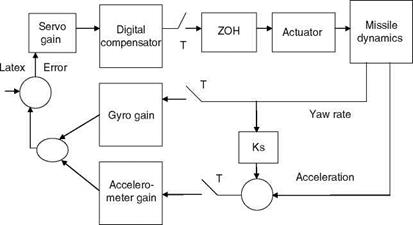
FIGURE C3 Schematic of a (missile) sampled data control system. (Latex—lateral acceleration demand; ZOH—zero order hold.) |
In such a system the signal conversion is done at tk, the sampling instant (or time) (Figure C3). The system runs open loop in the interval between the A-D and the D-A conversion (analog to digital and digital to analog), and the computational events in the system are synchronized by the real-time clock in the computer. Such a system is a sampled-data system, but the events are controlled and monitored by a computer or its dedicated microprocessor (chip). The D-A converter produces a continuous-time signal by keeping the control signal constant between the signal conversions. These signals are called sampled or discrete-time signals. Thus, we can use the term sampled data system synonymously for the computer-controlled system. In terms of the system – theoretic concept a computer-controlled system with periodic sampling is a periodic system because if a system is controlled by a clock, the response of the system to an external stimulus will then depend on how the external event is synchronized with the internal clock of the computer system. A digital control system would have several merits: (1) there is freedom from direct bias and drift of the analog computers, (2) desired accuracy can be obtained by proper implementation of the control algorithms in the computer, (3) generally there is no data storage limitation, (4) time-sharing ability of the digital computer can be used to advantage for reducing the cost of implementation/computation, (5) effect of quantization and sampling can be modeled and studied in advance of the implementation of the control strategies, (6) adaptive and reconfiguration control algorithms can be implemented with ease, and
(7) fuzzy logic-based control systems can be easily implemented.