Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




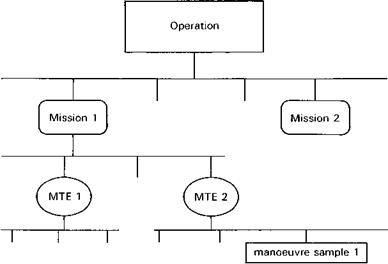
Flying qualities change with the weather or, more generally, with the severity of the environment in which the helicopter operates; they also change with flight condition, mission type and phase and individual mission tasks. This variability will be emphasized repeatedly and in many guises throughout this book to emphasize that we are not just talking about an aircraft’s stability and control characteristics, but more about the synergy between the internals and the externals referred to above. In later sections, the need for a systematic flying qualities structure that provides a framework for describing criteria will be addressed, but we need to do the same with the mission and the associated flying tasks. For our purposes it is convenient to describe the flying tasks within a hierarchy as shown in Fig. 2.2. An operation is made up of many missions which, in turn, are composed of a series of contiguous mission task elements (MTE). An MTE is a collection of individual manoeuvres and will have a definite start and finish and prescribed temporal and spatial performance requirements. The manoeuvre sample is the smallest flying element, often relating to a single flying axis, e. g., change in pitch or roll attitude. Objective flying qualities criteria are normally defined for, and tested with, manoeuvre samples; subjective pilot assessments are normally conducted by flying MTEs. The flying qualities requirements in the current US Army’s handling qualities requirements, ADS-33C (Ref. 2.1), are related directly to the required MTEs. Hence, while missions, and correspondingly aircraft type, may be quite different, MTEs are often common and are a key discriminator of flying qualities. For example, both
|
Fig. 2.2 Flying task hierarchy |
utility transports in the 30-ton weight category and anti-armour helicopters in the 10-ton weight category may need to fly slaloms and precision hovers in their nap-of-the-earth (NoE) missions. This is one of the many areas where ADS-33C departs significantly from its predecessor, Mil Spec 8501A (Ref. 2.2), where aircraft weight and size served as the key defining parameters. The MTE basis of ADS-33C also contrasts with the fixed-wing requirements, MIL-F-8785C (Ref. 2.3), where flight phases are defined as the discriminating mission elements. Thus, the non-terminal flight phases in Category A (distinguished by rapid manoeuvring and precision tracking) include air-to-air combat, in-flight refuelling (receiver) and terrain following, while Category B (gradual manoeuvres) includes climb, in-flight refuelling (tanker) and emergency deceleration. Terminal flight phases (accurate flight path control, gradual manoeuvres) are classified under Category C, including take-off, approach and landing. Through the MTE and Flight Phase, current rotary and fixed-wing flying qualities requirements are described as mission oriented.
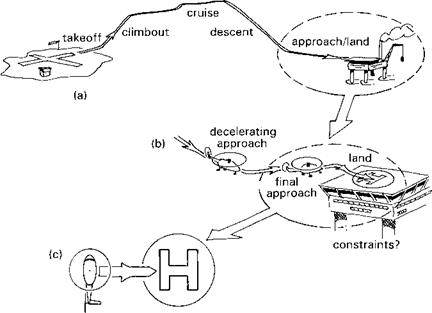
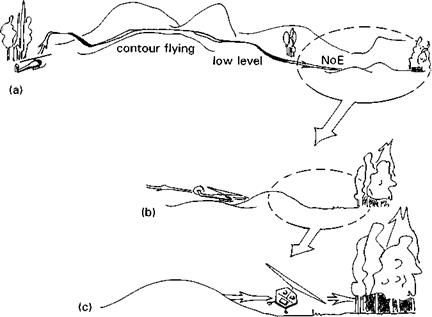
To understand better how this relates to helicopter flight dynamics, we shall now briefly discuss two typical reference missions. Figure 2.3 illustrates a civil mission, described as the offshore supply mission; Fig. 2.4 illustrates the military mission, described as the armed reconnaissance mission. On each figure a selected phase has been expanded and shown to comprise a sequence of MTEs (Figs 2.3(b), 2.4(b)). A typical MTE is extracted and defined in more detail (Figs 2.3(c), 2.4(c)). In the case of the civil mission, we have selected the landing onto the helideck; for the military mission, the ‘mask-unmask-mask’ sidestep is the selected MTE. It is difficult to break the MTEs down further; they are normally multi-axis tasks and, as such, contain a
|
Fig. 2.3 Elements of a civil mission – offshore supply: (a) offshore supply mission; (b) mission phase: approach and land; (c) mission task element: landing |
|
Fig. 2.4 Elements of a military mission – armed reconnaissance: (a) armed reconnaissance mission; (b) mission phase – NoE; (c) mission task element – sidestep |
number of concurrent manoeuvre samples. The accompanying MTE text defines the constraints and performance requirements, which are likely to be dependent on a range of factors. For the civil mission, for example, the spatial constraints will be dictated by the size of the helideck and the touchdown velocity by the strength of the undercarriage. The military MTE will be influenced by weapon performance characteristics and any spatial constraints imposed by the need to remain concealed from the radar systems of threats. Further discussion on the design of flight test manoeuvres as stylized MTEs for the evaluation of flying qualities is contained in Chapter 7.
Ultimately, the MTE performance will determine the flying qualities requirements of the helicopter. This is a fundamental point. If all that helicopters had to do was to fly from one airport to another in daylight and good weather, it is unlikely that flying qualities would ever be a design challenge; taking what comes from meeting other performance requirements would probably be quite sufficient. But if a helicopter is required to land on the back of a ship in sea state 6 or to be used to fight at night, then conferring satisfactory flying qualities that minimize the probability of mission or even flight failure is a major design challenge. Criteria that adequately address the developing missions are the cornerstones of design, and the associated MTEs are the data source for the criteria.
The reference to weather and flying at night suggests that the purely ‘kinematic’ definition of the MTE concept is insufficient for defining the full operating context; the environment, in terms of weather, temperature and visibility, are equally important and bring us to the second reference point.