Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




Whether a flying animal can hover or not depends on its size, the moment of inertia of its wings, the degree of freedom in the movement of the wings, and the wing shape. As a result of these limitations, hovering is mainly performed by smaller birds and insects. Larger birds can hover only briefly. Although some larger birds, such as kestrels, seem to hover more regularly, in fact they use the incoming wind to generate enough lift. The two kinds of hovering, symmetric and asymmetric, are described by Norberg [4] and Weis-Fogh [68].
Because larger birds cannot rotate their wings between forward and backward strokes, they extend their wings to provide more lift during downstroke, whereas during the upstroke their wings are flexed backward to reduce drag. In general the flex is more pronounced in slow forward flight than in fast forward flight. This type of asymmetric hovering, usually called “avian stroke” [24], is illustrated in Figure 1.28. As shown, to avoid large drag forces and negative lift forces, these birds flex their wings during the upstroke by rotating the primaries (tip feathers) to let air through.
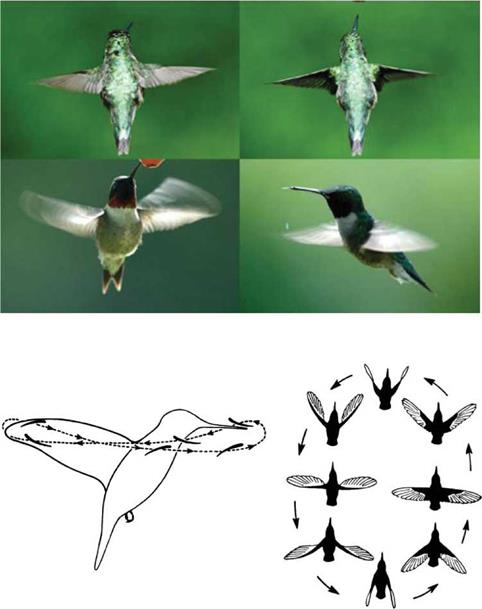
Symmetrical hovering, also called normal or true hovering, or “insect stroke,” is performed by hummingbirds or insects that hover with fully extended wings during the entire wing-beat cycle. Lift is produced during the entire wing stroke, except at the reversal points. The wings are rotated and twisted during the backstroke so that the leading edge of the wing remains the same throughout the cycle, but the upper surface of the wing during the forward stroke becomes the lower surface during the backward stroke. The wing movements during downstroke and upstroke can be seen in Figure 1.29. As shown, hummingbirds can rotate their shoulder joint enough to flip the wing over on the upstroke. Like most insects, they hover symmetrically with
0.01 sec intervals
(b)
 |
Figure 1.27. Schematic sketches of the roles of the outer and inner wing (a) and the up – and downstroke (b) for bird flight. The outer wing area is the main source of weight support and thrust generation during the downstroke. During the upstroke the forces are minimized. Upstroke is suitable for a small amount of thrust in slow flight, but not much weight support.
|
Figure 1.29. Illustration of the flapping wing patterns of a hummingbird: forward and back strokes, flexible and asymmetric wing motions, and a figure-eight pattern. (Bottom images are from Stolpe and Zimmer [69].) (a) Inclined hovering mode of a bat. The flapping motion is asymmetric, such that most of the required force is generated during the downstroke. (b) Resultant force in the downstroke in inclined hover is vertical [70]. |
a horizontal stroke plane. Their supracoracoideus (pull the wing down) is half the size of the pectoralis (pull the wing up). Note that, during hovering, the body axis is inclined at a desirable angle and the wing movements describe a figure-eight pattern lying in the vertical plane.
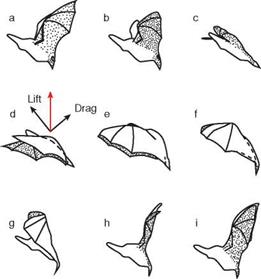
Most birds and bats hover with the stroke plane inclined about 30 degrees to the horizontal. As illustrated in Figure 1.30, the resultant downstroke force with a
|
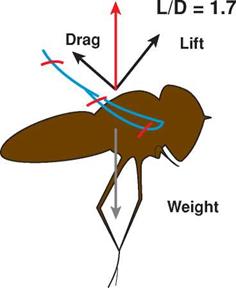
(a) Inclined hovering mode of a bat. The flapping motion is asymmetric, such that most of the required force is generated during the downstroke. |
|
(b) Resultant force in the downstroke in inclined hover is vertical [70]. Figure 1.30. In inclined hover the resulting force is vertical and supports the weight. |
lift-to-drag ratio of 1.7 is vertical. Except for small species, noticeably hummingbirds, the wing is typically flexed on the upstroke, minimizing forces on the wing. In inclined hovering flight, lift and drag on the downstroke support the weight.
Figure 1.31 illustrates the wing paths and associated kinematics at different speeds of a bumblebee flying at varying flight speed. The wings flap in a stroke plane
and flip over between half-strokes, resulting in forces that are nearly symmetrical in hovering. As the forward speed increases, the force generation between the up – and downstrokes becomes progressively different in magnitudes, with the downstroke becoming more dominant.