Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




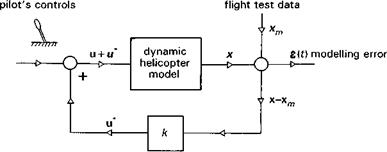
The process of validation and fidelity assessment is concerned ultimately with understanding the accuracy and range of application of the various assumptions distributed throughout the modelling. At the heart of this lies the prediction of the external forces and moments, particularly the aerodynamic loads. One of the problems with direct or forward simulation, where the simulation model is driven by prescribed control inputs and the motion time histories derived from the integration of the forces and moments, is that the comparisons of simulation and flight can very quickly depart with even the smallest modelling errors. The value of the comparison in providing validation insight then becomes very dubious, as the simulation and flight are soon engaged in very different manoeuvres. The concept behind inverse simulation is to prescribe, using flight test data, the motion of the helicopter in the simulation and hence derive the required forces and moments for comparison with those predicted by theory. One form of the process can be conceived in closed-loop form with the error between the model and flight forming the function to be minimized by a feedback controller (Fig. 2.34). If we assume that the model structure is linear with n DoFs x, for which we also have flight
|
Fig. 2.34 Inverse simulation as a feedback process |
measurements xm, then the process can be written as
The modelling errors have been embodied into a dummy control variable u* in eqns 2.80 and 2.81. The gain matrix k can be determined using a variety of minimization algorithms to achieve the optimum match between flight and theory; the example given in Ref. 2.26 uses the conventional quadratic least-squares performance index
 (2.82)
(2.82)
The elements of the weighting matrix R can be selected to achieve distributed fits over the different motion variables. The method is actually a special form of system identification, with the unmodelled effects being estimated as effective controls. The latter can then be converted into residual forces and moments that can be analysed to describe the unmodelled loads or DoFs. A special form of the inverse simulation method that has received greatest attention (Refs 2.27, 2.28) corresponds to the case where the feedback control in Fig. 2.34 and eqn 2.81 has infinite gain. Effectively, four of the helicopter’s DoFs can now be prescribed exactly, and the remaining DoFs and the four controls are then estimated. The technique was originally developed to provide an assessment tool for flying qualities; the kinematics of MTEs could be prescribed and the ability of different aircraft configurations to fly through the manoeuvres compared (Ref. 2.29). Later, the technique was used to support validation work and has now become fairly well established (Ref. 2.26).