Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




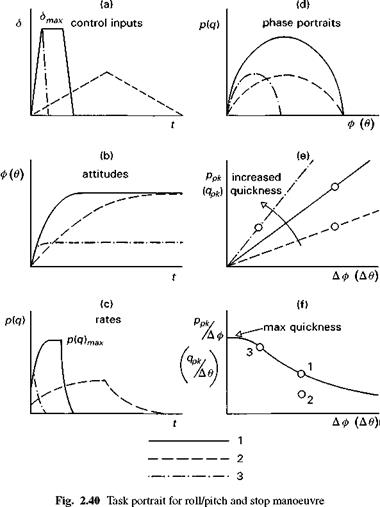
A pilot’s most immediate impressions of a helicopter’s flying qualities are likely to be formed as he or she attempts to maintain attitude and position in the hover, and later as the pilot manoeuvres and accelerates into forward flight. Here, the qualities of most interest are not the mid-long-term stability characteristics, but more the small-moderate-large amplitude, short-term response to control inputs (see Fig. 2.37). Consider the kinematics of a manoeuvre to change aircraft attitude. This may correspond, for example, to the initial phase of an acceleration from the hover (pitch) or a bank manoeuvre to turn in forward flight (roll). The so-called task portrait sketches in Fig. 2.40 illustrate the variations in pilot’s control inputs (a), the attitudes (b) and rates (c) and include the manoeuvre (phase plane) portrait (d) and task signature diagrams ((e) and (f)), corresponding to three different pilot control strategies. The example assumes a simple rate response type. Case 1 corresponds to the pilot applying maximum control input as rapidly as possible and stabilizing out with an attitude change. Case 2 corresponds to the pilot manoeuvring more gently to achieve the same attitude. Case 3 corresponds to the pilot applying a much sharper maximum-pulse input, achieving much the same rate as in case 2 but settling to a smaller final attitude. For the third case, the input is so sharp that the aircraft does not have time to reach its steady-state rate response. The three cases are distinguished by the degree of aggressiveness and the size of the pilot input, i. e., by different frequency and amplitude content. The task signature diagrams (e) and (f) are constructed by computing the peak rate, ppk, and associated attitude change Аф for the different manoeuvres; each represents a point on the diagram. The ratio of peak rate to attitude change, shown in Fig 2.40(f), is a key parameter. Designated the ‘quickness’ parameter in ADS-33, this ratio has a maximum achievable value for a given attitude change. For large manoeuvres, the limit is
* Pilot required to perform non-control-related sidetasks for a moderate period of time.
|
|
naturally set by the maximum achievable rate or the attitude control power, p(q)max; case 1 represents an example of such a situation. The quickness is a frequency measure and, for small amplitudes, represents the maximum ‘closed-loop’ frequency achievable from the aircraft. It is therefore, on the one hand, a measure of the inherent manoeuvre performance or agility of the aircraft and, on the other, a handling qualities parameter. If the maximum achievable quickness is too small, then the pilot may complain that the aircraft is too sluggish for tracking-type tasks; if the quickness is too high, then the pilot may complain of jerkiness or oversensitivity.