
Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




Assuming that the aircraft does not perform maneuvers with large excursion, it is possible to characterize the aircraft response to pitch stick inputs by considering only the lift force, drag force, and pitching moment equations.
 |
||
Equation 3.22 gives the Euler angles, Equation 3.23 gives the differential equations for the angular rates, and Equation 3.27 gives the polar form for V, a, and b. Assuming the aircraft to be symmetric about the XZ plane, i. e., Ixy and Iyz are zero, the general free longitudinal motion can be described by eliminating the b, p, r, and ф equations from the 6DOF state model. This leaves us with the following set of differential equations:
q cos ф — r sin ф
In the above set, although the differential equations for b, p, r, and ф are omitted from analysis, these terms still appear on the right-hand side of the equations. Measured values of b, p, r, and ф can be used to solve the above equations. Equation
5.6 can be further simplified by assuming these quantities to be small during longitudinal maneuvers and neglecting them altogether. This gives the following set of equations:
V = g( cos U sin a — sin U cos a) — — CDwind H— cos (a + sT) cos b
mm
![]()
![]() a = — (cos U cos a + sin U sin a) + q — ~qSCL——- sin (a + sT)
a = — (cos U cos a + sin U sin a) + q — ~qSCL——- sin (a + sT)
V mV mV
q = Y { qScCm + T(ltx sin St + ltz cos St)}
Iy
We also know from Equation 3.30 that
Cowind = Cd cos b — Cy sin b
For small values of b
CDwind — CD
![]()
|
||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
|
![]()
|
|
||
|
|||
|
|
||
|
|||
|
|||
|
|
||
|
|
||
|
|||
|
|||
|
|
TABLE 5.1 Longitudinal Mode Characteristics of the Aircraft
|
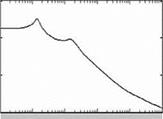
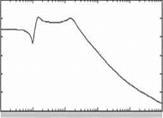
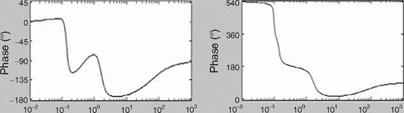
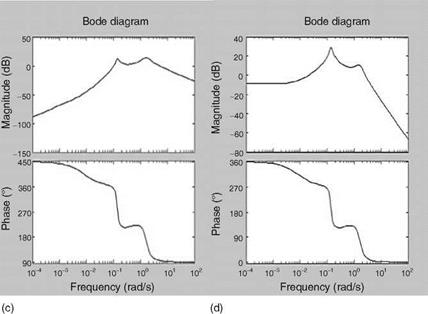
aircraft dynamics has two distinct modes: one at lower frequency and another at relatively higher frequency. This shows the feasibility of modeling these two modes separately as they are relatively well separated. One can also discern from these plots that the low- frequency mode is lightly damped compared to the higher-frequency mode, which is confirmed in Table 5.1.
In fact this shows the feasibility of separately representing the modes in two different characteristic modes, since these modes seem to be well separated. We see from Figure 5.2 that the pitch rate response is well damped and the pitch attitude response takes more time to settle. This leads to the two distinct modes discussed in the next section.
