Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




 |
Consider two-dimensional small-amplitude disturbances superimposed on a uniform mean flow of density p0, pressure p0, and velocity u0 in the x direction. The linearized Navier-Stokes equations may be written in the following form:
(T )(n) = (T )(n) = „ Lи») + _!_v
![]()
![]()
 |
(Txy )l, m = (Tyx )l, m = r uj д yul, m+j + д%у j=-3 z y
where l, m are the indices of the mesh points and the superscript n is the time level. If U = Uinitial at t = 0 is the initial condition for the Navier-Stokes or Euler equations, the appropriate initial conditions for the DRP scheme (6.19) are
U(0m = Uinitial’ UUn = 0 fornegative П. (6.20)
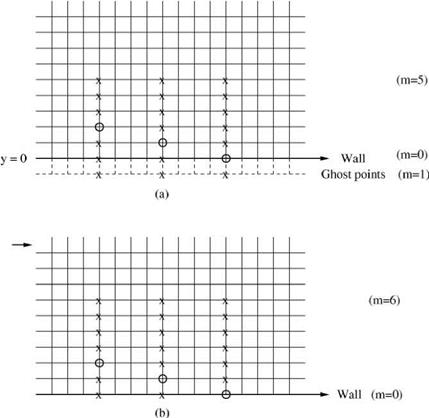
Suppose the fluid is inviscid and a solid wall lies at y = 0 as shown in Figure 6.6. For points lying three rows or more away from the wall, the computation stencil for them lies entirely inside the physical domain. They are referred to as interior points. For the first three rows of points adjacent to the wall, their 7-point stencil will extend outside the physical domain. They are referred to as boundary points. The points outside the computation domain have no physical meaning. They are called ghost points.
Although ghost points are fictitious points with no physical meaning, they are necessary for high-order finite difference schemes. To see this, recall that the solution of the Euler or Navier-Stokes equations satisfies the partial differential equations at every interior or boundary point. In addition, at a point on the wall, the solution also satisfies the appropriate boundary conditions. Now, the discretized governing equations are no more than a set of algebraic equations. In the discretized system, each flow variable at either an interior or boundary point is governed by an algebraic
equation (a discretized form of the partial differential equations). The number of unknowns is exactly equal to the number of equations. Thus, there will be too many equations and not enough unknowns if it is insisted that the boundary conditions at the wall are satisfied also. This is, perhaps, one of the major differences between partial differential equations and finite difference equations. However, the extra conditions imposed on the flow variables by the wall boundary conditions can be satisfied if ghost values are introduced. The number of ghost values is arbitrary, but the minimum number must be equal to the number of boundary conditions. For an inviscid flow, the condition of no flux through the wall requires a minimum of one ghost value per boundary point on the wall. For two-dimensional viscous flow, the no-slip boundary condition requires a minimum of two ghost values per boundary point on the wall for two-dimensional problems. In principle, one can introduce more than the minimum number of ghost values. But for each extra ghost value, a condition must be imposed so that it can be uniquely determined. Clearly, the quality of the solid wall boundary conditions in terms of acoustic wave reflection, acoustic boundary layer characteristics, etc., would be affected by these extra ghost values. Since there is no compelling advantage to introduce extra wall boundary conditions, in the present approach, only the minimum number of ghost values is used.
To fix ideas, let us first consider an inviscid fluid adjacent to a solid wall at y = 0 (see Figure 6.6). In this case, the wall boundary condition is v = 0at y = 0, where (u, v) are the velocity components in the x and y direction, respectively. Since there is one boundary condition, one ghost value is needed for each boundary point at the wall. Physically, the wall exerts a pressure on the fluid with a magnitude just enough to make v = 0 at its surface. This suggests that a ghost value inp (pressure) at the ghost point immediately below the wall should be used to simulate the pressure exerted by the wall. Because only one ghost value is adopted, the difference stencil for the y derivative in the boundary region needs to be modified. Here, it is proposed that the y derivatives are to be computed according to the backward difference stencils shown in Figure 6.7. According to this scheme, the quantities dp/dy, du/dy, and dv/dy are all calculated using values of the variables lying inside the physical domain. For the y derivative of p the stencils extend to the ghost point below the wall. Now, the ghost value of p at the ghost point (l, -1) or pf-1 is to be chosen so that vfl is zero for all n. This can be accomplished through the discretized form of the y-momentum equation (the third equation of Eq. (6.16)), which is used to calculate the value of v at the next time level). Upon incorporating the backward difference stencils of Figure 6.7, the y-momentum equation at a wall point (l, 0) is
3
where a51 are the optimized coefficients of the backward difference stencil. Equations (6.21) and (6.22) are to be used to find vf^1 after all the physical quantities except pne -1, the ghost value, are found at the end of the nth time level computation. To ensure that the wall boundary condition vl"0+1) = 0 is satisfied, the ghost value pf-1
|
may be found by setting v("+1) = 0 in Eqs. (6.21) and (6.22) and then solve for pf-1 This gives
5
Eq. (6.23) is tantamount to setting the ghost value such that 9p/дy = 0 at the wall. It is worthwhile to point out that if no ghost value is introduced, and the boundary condition vf0 is imposed, Eq. (6.21) or its equivalent will, in general, not be satisfied. This means that дp/дy of the solution so computed would not necessarily be equal to zero at the wall.
Now attention is turned to a viscous compressible fluid. In this case, the viscous stress terms of Eqs. (6.16) and (6.17) are to be retained. The stresses are physical quantities and can be computed from the velocity field by the same 7-point difference stencil at an interior point or by the backward difference stencils of Figure 6.7 at a boundary point. For example, at an interior point (1, m), the shear stress тxy at the nth time level is given by
Figure 6.8. Plane acoustic waves incident on a wall at an angle of incidence of в.
where д is the shear viscosity coefficient. (Note: The stress terms are calculated and stored at each time level as a part of the solution. The derivatives of the stresses are computed by the first derivative stencil applied directly on the stresses. No second derivatives need be computed.) At the wall, the no-slip boundary condition u = v = 0 must be enforced. Two ghost values are, therefore, needed per each boundary point at the wall. On following the inviscid case, the ghost value pf-_1 will again be used to ensure that v(n0 = 0 for all n. Physically, in addition to applying a pressure on the fluid normal to the wall, the wall also exerts a shear stress т xy on the fluid to reduce the velocity component u to zero at its surface. This suggests that a ghost value (тху )f-_1 be included in the computation. To enforce boundary condition u(n0 = 0, it is noted that u is determined by advancing the x-momentum equation in time. By following the treatment of v = 0, it is recommended that the у derivative of тxy in the x-momentum equation be approximated by the same backward finite difference stencils as those for p (see Figure 6.7). It is easy to see that the ghost value (тху )(n 1 can be found (in exactly the same way by which the ghost value p(en)_1 is determined) by imposing the no-slip boundary condition u(n0+1) = 0 on the x-momentum equation at the boundary point (l, 0) at the wall. In this way, a unique solution satisfying both the discretized form of the Navier-Stokes equations and the no-slip boundary conditions can be calculated.