
Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




One of the real roots with a small value (relatively long time-period) indicates the spiral mode. The root can have a negative or positive value, making the mode convergent or divergent. This mode is dominated by rolling and yawing motions; sideslip is almost nonexistent. The characteristic root l for spiral mode is given by
![]() LpNr — LrNp l
LpNr — LrNp l
Lb
 DR Frequency and Damping Ratio
DR Frequency and Damping Ratio
1.08 rad/s 0.328
 |
||
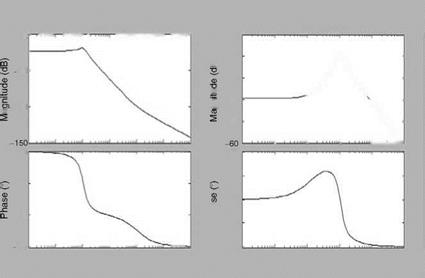 (c) (d)
(c) (d)
FIGURE 5.7 DR mode frequency responses of a fighter aircraft. (a) Beta/aileron, (b) yaw rate/aileron, (c) beta/rudder, and (d) yaw rate/rudder.
Increasing Lb (dihedral effect) or Nr (yaw damping) will make the spiral mode more stable.
5.4.3 Roll Mode
(c) (d)
l = Lp (5.30)
Here, Lp is the roll damping derivative.
Roll subsidence mode is a first-order convergent mode of relatively short time constant.
In summary, DR is the dominant characteristic of any aircraft. However, its dominance in the roll angle TF is very small. This is because a quadratic numerator in the roll, aileron TF, almost cancels the DR denominator. Thus, the DR excited by the aileron is more predominant in roll rate and AOSS. The rudder contribution to the roll rate is small. The DR damping is usually positive, referring to Equation 5.28.
Therefore, the 2DOF DR mode would be a damped oscillation, or worst case divergence/subsidence. The 3DOF DR approximation would incorporate roll rate as an additional state variable. This will then have three roots: the spiral mode, the roll subsidence mode, and DR. The 3DOF spiral and roll subsidence approximation can also be made. The roll subsidence mode is dominant in the rolling motion. In the spiral mode the rolling and yawing motions predominate. Mostly unstable, the mode has a very large time constant. It is a fairly coordinated rolling and yawing motion mode.
