Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




|
Fig. 2.51 Simple feedback augmenting pitch rate damping |
SCAS and integrated displays go some way to providing this. Autostabilizers were first developed to increase the helicopter’s operational envelope to include flight under instrument conditions. The first priority was to provide artificial stability to ensure that the aircraft would not wander off when the pilot’s attention was divided with other tasks. If we consider the addition of rate damping in the pitch axis, we can write the feedback law in proportional form:
Oisa = kqq (2.84)
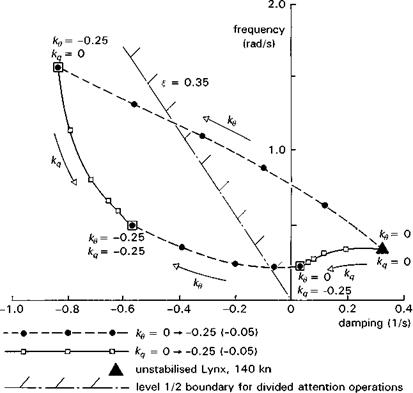
Figure 2.51 shows a block diagram of this feedback loop. With this proportional feedback working, as the helicopter flies through turbulence, every 1°/s of pitch rate change is counteracted by k° of longitudinal cyclic pitch Ois. The higher the value of gain kq, the greater the ‘artificial’ stability conferred on the helicopter. The root loci in Fig. 2.52 illustrates how the high-speed unstable pitch mode can be stabilized through pitch rate feedback for Helisim Lynx. We can see that even with quite high values of gain magnitudes (~ 0.25), the aircraft is still marginally unstable. Gain magnitudes much higher than about 0.2 would not be acceptable because the limited authority of today’s SCAS designs (typically about ±10% of actuator range) would result in the augmentation quickly saturating in manoeuvres or moderate turbulence. We can conclude from this discussion that rate feedback is insufficient to provide the levels of stability required for meeting Level 1 flying qualities in divided-attention operations. If we include attitude stabilization in the feedback loop, the control law can be written in proportional plus integral form
Oisa = kqq + ko J q dt (2.85)
Attitude feedback provides an effective stiffness in the pitch axis, and increasing ko serves to increase the frequency of the unstable pitch mode as shown in Fig 2.52. An appropriate combination of rate and attitude feedback can now be found to ensure Level 1 flying qualities and most modern SCAS designs incorporate both components. Rate and attitude feedbacks provide stability augmentation; but do nothing positive for control augmentation; in fact, the control response is reduced as the stability augmentation fights the pilot’s actions as well as disturbances. Control augmentation is
|
Fig. 2.52 Variation of long period pitch mode frequency and damping with autostabilizer gains for Lynx at 140 knots |
accomplished by feeding forward the pilot’s control signals into the SCAS, applying shaping functions or effectively disabling elements of the stability augmentation during manoeuvres. Different SCAS designs accomplish this in different ways; the Lynx system augments the initial response with a feedforward signal from the pilot’s control, while the Puma system disables the attitude stabilization whenever the pilot moves the controls. More modern systems accomplish the same task with greater sophistication, but modern SCAS designs that interface with mechanical control systems will always be limited in their potential by the authority constraints designed to protect against failures. In the limit, increasing the authority of the augmentation system takes us towards ACT where the pilot’s control (inceptor) inputs are combined with multiple sensor data in a digital computer to provide tailored response characteristics. ACT is still a developing technology for rotorcraft at the time of writing, but the potential benefits to both military performance and civil safety are considerable and can be classed under three general headings:
(1) task-tailored Level 1 flying qualities throughout the OFE, e. g., tailored for shipboard recoveries, underslung load positioning or air combat;
(2) carefree handling, ensuring safe operations at the edges of the OFE;
(3) integration with mission functions, e. g., navigation, HUMS.
The introduction of ACT into helicopters also offers the designer the opportunity to explore control-configured designs, in much the same way that fixed-wing military aircraft have developed over the last two decades. Even with the conventional single-rotor helicopter, ACT can free the designer to remove the empennage stabilizers altogether or alternatively to make them moving and under computer control. The main rotor could be made smaller or lighter if a carefree handling system were able to ensure a particular loading pattern in manoeuvres and at the OFE boundary. Of course it is with the more advanced rotorcraft concepts, with multiple control motivators, e. g., tilt rotors and thrust/lift compounding, that ACT will offer the greatest design freedoms and flying qualities enhancement. While this book has little to say about the flight dynamics of advanced rotorcraft, the author is conscious that the greatest strides in the future will be made with such configurations, if the ‘market’ can afford them or if the military requirements are strong enough.