Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




6.1 INTRODUCTION
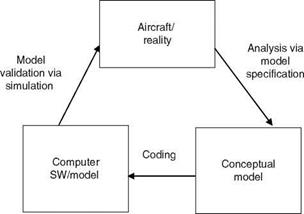
Simulation of flight dynamics is a very important and crucial component of any large aircraft development program. Simulation is meant to replicate the real-life environment and the behavior of an aircraft in flight, mainly on ground [1-5]. When similar replication is done in air it is called in-flight simulation (IFS). Wind tunnel is a type of simulation (Appendix A). Simulation can be used when the system does not exist, e. g., development of a new aircraft. It is also used when experiments with real systems are very expensive and not very safe, especially for training new pilots/flight test engineers/crew. A simulator is thus a very useful system/device for the study of dynamic behavior of aircraft (including rotorcraft, missiles, UAVs, MAVs); to try out difficult and sometimes risky experiments; to conduct failure mode trials to test flight-control laws; to get the feel of the various systems and robustness and reliability of other critical subsystems. It really calls for a systems approach from theoretical, analytical modeling to practical evaluation/validation of the flight mechanics/flight control/handling qualities behavior of the simulated vehicle. One guesstimate is that in the world there would be more than 600 simulators, which are used for training and maintaining the skills of military and civilian aircrew. Research flight simulators are used for evaluating the design options without primarily building the prototypes of aircraft, thereby saving considerable time, effort, and cost. Various design implications can be studied and evaluated in research simulators. There are several benefits of using flight/research simulators: (1) increased efficiency, since there is no limitation of airspace or adverse weather conditions, (2) enhanced safety, (3) drastically reduced training cost, and (4) rehearsal of several situations that cannot be practiced in real flight. The design, development, and use of a flight simulator involve considerable modeling and analysis exercises. One goes from the reality to a conceptual model via analysis, from this to computer model via programming, which then simulates the reality. Figure 6.1 depicts this very clearly. Using procedures of verification, the computer SW/program models are confirmed as an adequate representation of the conceptual model. The computer models are then validated for possessing satisfactory accuracy in comparison with reality by extensive simulation for the intended flight-like maneuvers and exercises. Thus, the process of flight simulation is an iterative one.
Simulation can be at various levels: software (SW), hardware (HW), or both [1]. Mainly for simulation of aircraft dynamics, one needs to mathematically model the dynamics of every subsystem that is deemed important and contributes to generate the time responses of the aircraft [2,3]. For accurate simulation, high-fidelity models
|
Model verification FIGURE 6.1 Modeling and analysis is triad for flight simulation. |
are needed. Simulation is thus pretending the reality, and for visual impact (like environment, runway conditions) one uses the concepts and techniques of visual software and virtual reality. Often the instruments on the cockpit instrument panel are ‘‘soft instruments.’’ There are multifunction displays and the actual instruments required in the simulator are just a minimum set. This reduces the maintenance efforts, volume, and cost. Therefore, simulation is meant to provide almost real-life environment, controls, and feel of the actual aircraft/system that is being simulated. If one is in the ground base simulator (say without motion), but with strong visual cues, one feels that one is in the actual aircraft as far as the dynamic behavior and visuals are concerned. If the simulator is used for aiding design, development, and validation of flight-control laws, then a test pilot, engaged for flight testing of the aircraft being designed, or a control engineer should ‘‘fly’’ the simulator. This simulator is then called pilot/engineer-in-the-loop simulator [4]. It consists of cockpit, controls, throttle, switches, data acquisition system, and visualization/executive SW and can be run in a batch or real-time mode. A batch simulation works in a preprogrammed and multiuser mode and computer-generated inputs can be used. Batch simulation does not need any hardware except a PC. A preprogrammed command could be given as input to the computer in which the computation of flight dynamics and other math models is carried out. The computer monitor would serve as the display system for the batch simulation results.
In a hardware-in-loop simulator (HILS), the actual flight computer with control law software is also incorporated for testing. HILS is used for testing safety critical flight-control software as well as flight computers in an easily controlled laboratory environment at a relatively low cost. In an iron-bird simulator (wherein ‘‘ironangles/ beams’’ are used), the subsystems like actuators, hydraulics system, computers, and cabling are incorporated and interconnected to represent the aircraft more completely for ground testing. A full-fledged simulator, with or without motion cues,
|
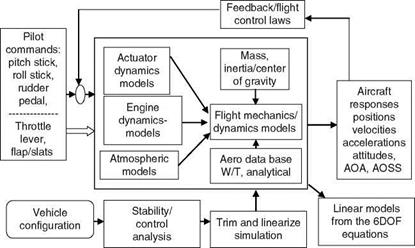
FIGURE 6.2 Components of a typical soft-flight simulation scheme. |
is called a real-time simulator (RTS); the test-pilots would fly and try out all the flight test maneuvers on it, before flying the actual aircraft (for which the RTS is meant). It includes cockpit, control stick, pedals, and throttle. Normally, it would be a single user mode. RTS can be used for certification of flight-control laws, at least for some important flight conditions. Figures 1.2 and 6.2 show the schematic of a ‘‘soft’’ flight simulator with associated control-law development/validation process integrated with many subsystems, which play an important role in the development of the simulator facility [4].
Both fix – and motion-based flight simulators play a vital role in the evaluation of flight-control laws and handling qualities of the aircraft right at the development stage and are used to gain enhanced confidence in the performance of the aircraft. The idea in variable stability research aircraft/in-flight simulation (VSRA/IFS) [5] is that the static and dynamic stability characteristics of this simulator vehicle can be varied over a wide range using feedback control laws and that this host simulator (aircraft) would be used to fly like the guest aircraft that is being simulated, and hence the name IFS. A variable feel system should be included to simulate various control system characteristics. The other uses of this facility are pilot training for advanced vehicles and the solution of specific stability and control-design problems. These simulators provide motion and visual cues that are more realistic than some ground-based simulators. In addition to this, airborne simulators provide the stresses and motivation that can be attained in the actual flight environment to the pilot. Also, IFS can be used to evaluate ground-based simulators.
The development of VSRA/IFS could proceed in three phases:
1. Literature survey on the process of development and related methodologies, study of existing aircrafts (fighter, trainers, and transport), systematic evaluation of these with a view to adopting one of these for the intended
purpose, other HW/SW requirements, related cost and manpower skill requirement and whether all that is available and how to tap it. Maintenance and related aspects should be addressed initially. Finalization of the strategy of development and planning.
2. Systematic development of the facility in a modular fashion, upgradation of the selected aircraft with HW/SW (avionics/instruments/flight control, etc.) and various integration studies, exercise, etc. Preliminary evaluation of the performance of the host aircraft (IFS) and improvements there from. Detailed analysis of the ongoing development process and feedback from the users of the facility.
3. Refinement based on the trial runs and HW/SW configuration improvement if needed. Training of the pilots and research evaluations, extensive flight data analysis, and control-law evaluation and refinement if needed, performance evaluation through several mission-related tasks, etc.
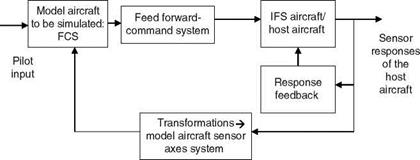
The above strategy is also applicable to the development of other simulators, except that an actual aircraft is not required, instead its mock-up would be needed. Since for the IFS a different aircraft (host) is used to simulate the dynamics and control laws of the aircraft that is being developed and simulated, the flight dynamics/control bandwidth of the host aircraft has to be greater than that of the simulated aircraft. The IFS is an aircraft whose stability, feel, and flying characteristics can be changed to match those of ‘‘to-be-simulated’’ aircraft. The IFS is useful in realistically and safely evaluating a new or modified aircraft before its first flight and before even committing the aircraft to production. A schematic of the IFS’s response feedback system is shown in Figure 6.3. What would physically fly is the host aircraft and not the model aircraft that is simulated; however, the host aircraft is made to/will behave like the guest aircraft. The augmented dynamics of the simulated aircraft are matched by the host aircraft by feeding back appropriate motion variables to the control surfaces. One can easily imagine that the process from ground-based to final IFS, and for many other types of simulators, involves
|
|
increasing complexity, sophistication and cost, and of course, enhanced confidence in the performance/testing of the aircraft.
The main purpose of any simulator is to obtain the dynamic responses of the aircraft for specific inputs and in the presence of simulated environment, e. g., turbulence and gust. Often the list of these specific inputs is very large. Many such practicable pilot command inputs (signals) are discussed in Chapter 7. All such maneuvers can be tried out in an RTS wherein the pilot sits in the cockpit and uses the command sticks/wheel and rudder pedals to excite the modes of the aircraft. Thus, flight simulation/simulator provides reasonably accurate, sometimes high-fidelity representation of the sensation of sound, touch, visual scenario (often called simply the visuals), and acceleration feels (for motion-based simulators) as encountered in flight. Thus, flight simulation is very essential in aircraft design and development programs. It could be a totally and fully virtual reality simulator with powerful visuals. Training simulators are also used for pilot training before they can fly transport or fighter aircraft. For phases like landing, takeoff, and tracking tasks, a longer period of simulation run (e. g., 10 to 15 min) is required and needs a designer or an engineer/pilot in the loop.
Thus, the flight simulation process centers around: (1) study of flight dynamics (including the coordinate systems/transformations) and formulating these in mathematical language, which translates to mathematical models, in fact into equations of motion (EOM) (Chapters 3 and 4) and (2) the coding of these math models and implementing the codes/algorithms via a suitable programming language (preferably C) in a computer. Overall functioning of flight simulation (process) involves (1) developing the performance requirements, (2) integrating subsystems/ subcomponents, (3) guiding and validating the design of the vehicle and the flight – control laws, (4) supporting the flight testing of the aircraft and reducing the cost of the actual flight tests, (5) investigating inaccessible environments and practice, otherwise, dangerous procedures and exercises, (6) pilot/crew training, and (7) supporting R&D in all the above aspects via the flight-simulation process and exercises.