
Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




 |
The analysis of a simple model – see Figure 4.33 – can only measure the natural frequencies of the rotor. This is perfectly adequate if the rotor speed values capable of inducing a resonance are required. It cannot give any indication of the damping necessary to suppress any instability. A full 5/6 degree of freedom (DOF) model must be used for the most exacting calculations;
|
Table 4.1 Ground resonance input parameter values |
||
|
Parameter |
MATLAB variable name |
Value |
|
Static rotor lag frequency (rad/s) |
wl0 |
15.22 |
|
Fuselage frequency (rad/s) |
wy |
12 |
|
Lag hinge offset (m) |
e |
1.22 |
|
Rotor radius (m) |
r |
6.4 |
|
Blade mass (kg) |
bladm |
24.80 |
|
Number of blades |
nblad |
4 |
|
Fuselage mass (kg) |
fusm |
500 |
however, a single degree of freedom model, as shown in Figure 4.33, can provide very useful insight into the manner in which the rotor lag and fuselage frequency and damping values influence the stability of the overall vehicle.
The numerical values of the various parameters are presented in Table 4.1.
From these data the following results are presented.
 |
Figure 4.34 shows the frequency variation of the overall system with rotor speed. The shape of the graphs is very similar to those of the simple model. However, there are important differences. Firstly, at the low rotor speed values the graphs show an interesting behaviour in that they seem to exchange characteristics. This is a common situation when two uncoupled systems (in this case the blade lagging and the fuselage motion) are connected. The second, and more important, observation is the two regressing modes in the region of 35rad/s rotor speed. They coalesce, which cannot happen in a simple analysis of frequency only. Consulting Figure 4.35 shows that an undamped system displays instability (positive real part) for this rotor speed range. It is neutrally damped at other rotor speeds.
 |
There is therefore a potential instability which must be suppressed. This usually is accomplished by adding damping and, while it is possible to incorporate this damping in several parts of the airframe, in order to fully suppress ground resonance, certain requirements must be met.
To see the effect, a range of damping is applied to the rotor head and the fuselage via the undercarriage.
Figure 4.35 also shows the effect of adding damping to the rotor lag (legend right-hand column) and the fuselage (legend left-hand column). If damping is added to either the rotor or the fuselage while leaving the other undamped, instability remains. If the damping is applied to both rotor and fuselage, then elimination of the instability can be achieved. This result is predicted in Coleman and Feingold [2] where they express this situation thus. If ZFUS is the damping ratio for the fuselage and Crot is that for the rotor then the following condition must apply for stability:
Cfus • Crot > h > 0 (444)
The product of the two damping values must be positive, which cannot be achieved if one is undamped. Therefore damping must be applied evenly, which is not always convenient.
With reference to Figure 4.36, the influence of the rotor head mass can be seen. For the simple model, the rotor head was fixed and, therefore, the fuselage could take no part in the motion and thus was isolated from the rotor. Now the rotor can move laterally, the fuselage is included in the motion, and the effect can be expressed via the effective head mass. The analysis of the system was carried out using an energy-based method. Therefore the fuselage must be included via its kinetic energy. This calls into play the manner in which the fuselage moves. If the fuselage motion is considered to be in roll only, then the motion about the CG will be a combination of sway and roll angle. It will have, therefore, a point about which it is effectively rotating. This point will govern the interaction between the fuselage dynamics and the rotor blade lag motion. Figure 4.36 shows that the lower the value of the effective head mass, the more unstable the ground resonance motion. Figure 4.37 shows two situations where the rotation centre is placed low or high on the fuselage. For a given rotation amount, the low centre gives more head
movement. If the head mass is to reflect the kinetic energy of the complete aircraft then the situation with greater head motion will give rise to a lower value of effective head mass. Also the greater head motion will encourage the interaction between the blade lagging and the motion of the fuselage on its undercarriage. Hence the lower head mass can be expected to give a greater amount of feedback and thus a more unstable condition can be predicted.
Figure 4.38 shows the effect of fuselage frequency giving more instability for the higher values.
Figure 4.39 shows the effect of blade lag frequency and the higher values of lag stiffness giving the more stable condition. Therefore, a semi-rigid rotor system will require smaller amounts of damping to ensure stability.
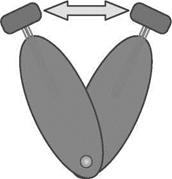

Low Rotation Point
Greater Head Movement
High Rotation Point
Smaller Head Movement
 |
|
|
0.8
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 0.6
0.6
0.4
0.2
0
-0.2
1-0.4
-0.6
-0.8
-1
-1.2
0
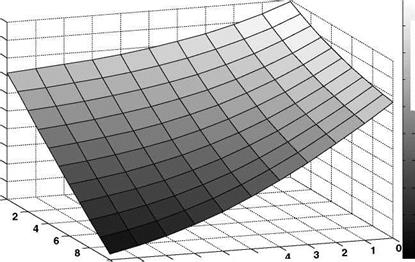
Figure 4.40 is a surface plot showing the effect on the stability of the aircraft for a range of lag and fuselage damping values. The shape of the surface is another illustration of the law defined in Equation 4.14.
