
Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




Hovering dynamics have long presented a challenge to reduced order modelling. The eigenvectors for the unstable hover ‘phugoid’ for the three aircraft are given in Table 4.3 and highlight that the contribution of the normal velocity w to this oscillation is less than 10% of the forward velocity u.
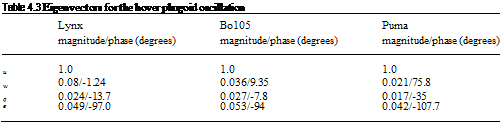
This suggests that a valid approximation to this mode could be achieved by neglecting the vertical motion and analysing stability with the simple system given by the surge and pitch equations
u — Xuu + gO — 0 (4.126)
q — Muu — Mqq — 0 (4.127)
The small Xq derivative has also been neglected in this first approximation. In vector – matrix form, this equation can be written as
![]()
![]() (4.128)
(4.128)
 |
|||
The partitioning has been added to indicate the approximating subsystems – the relatively high-frequency pitch subsidence and the low-frequency phugoid. Unfortunately, the first weakly coupled approximation indicates that the mode damping is given entirely by the derivative Xu, hence predicting a stable oscillation. We can achieve much better accuracy in this case by extending the analysis to the second approximation (see Appendix 4A), so that the approximating characteristic equation for the low-frequency oscillation becomes
The approximate phugoid frequency and damping are therefore given by the simple expressions
![]()
|
|
|
|
|
|
|
|
|
|
|
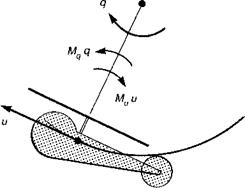
Fig. 4.26 Simple representation of unstable pitch phugoid in hover |
The ratio of the pitching moments due to speed (speed stability) and pitch rate (damping) play an important role in both the frequency and damping of the oscillation. This mode can be visualized in the form of a helicopter rotating like a pendulum about a virtual hinge (Fig. 4.26). The frequency of the pendulum is given by
a2 = 1 (4.133)
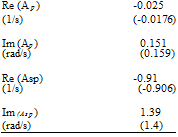
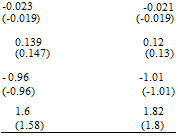
where t is the length of the pendulum (i. e., distance of helicopter centre of mass below the virtual hinge). This length determines the ratio of u to q in the eigenvector for this mode (cf. eqn 4.131). Comparison of the approximations given above with the ‘exact’ uncoupled phugoid roots is given in Table 4.4.
There is good agreement, particularly for the Lynx and Bo105. The smaller pitch damping for the Puma results in a more unstable motion, characteristic of articulated rotor helicopters at low speed. The speed stability derivative Mu is approximately proportional to the flapping derivative
дв1с 8
-Г1 =o °0 – 2^0 (4.134)
dp, 3
and scaled by the hub moment. The amount of flapback for a speed increment therefore depends only on the rotor loading, defined by the collective and inflow components. This derivative is the source of the instability and dominates the damping in eqn 4.132.
|
Table 4.4 Comparison of ‘exact’ and approximate hover phugoid eigenvalues
|
As the helicopter passes through the ‘trough’ of the oscillation, the velocity u and pitch rate q are both at a maximum, the former leading to an increased pitch-up, the latter leading to a pitch-down, which, in turn, leads to a further increase in the u velocity component. The strong coupling of these effects results in the conventional helicopter configuration always being naturally unstable in hover.
The concept of the helicopter oscillating like a pendulum is discussed by Prouty in Ref. 4.9, where the approximate expression for frequency of the motion is given by
![]()
![]() (4.135)
(4.135)
From eqn 4.133 we can approximate the location of the virtual point of rotation above the helicopter
The expression for the approximate damping given in eqn 4.132 provides a clue as to the likely effects of feedback control designed to stabilize this mode. The addition of pitch rate feedback (i. e., increase of Mq) would seem to be fairly ineffective and would never be able to add more damping to this mode than the natural source from the small Xu. Feeding back velocity, hence augmenting Mu, would appear to have a much more powerful effect; a similar result could be obtained through attitude feedback, hence adding effective derivatives Xв and Me.
The longitudinal pitch and heave subsidences hold no secrets at low speed and the eigenvalues are directly related to the damping derivatives in those two axes. The comparisons are shown in Table 4.5.
The hover approximations hold good for predicting stability at low speed, but in the moderate – to high-speed range, pitch and heave become coupled through the ‘other’ static stability derivative Mw, rendering the hover approximations invalid. From Figs 4.23(b), 4.24(b) and 4.25(b) we can see that the stability characteristics for the Lynx and Bo105 are quite different from that of the Puma. As might be expected, this is due to the different rotor types with the hingeless rotors exhibiting a much more unstable phugoid mode at high speed, while the articulated rotor Puma features a classical short – period pitch/heave oscillation and neutrally stable phugoid. At high speed, the normal velocity w features in both the long and short period modes and this makes it difficult to partition the longitudinal system matrix into subsystems based on the conventional aircraft states {u, w, q, в}. In Ref.4.25 it is shown that a more suitable partitioning can be found by recognizing that the motion in the long period mode is associated more
|
Table 4.5 Comparison of ‘exact’ and approximate longitudinal subsidences
|
with the vertical velocity component
w о = w — Ue8 (4.137)
Transforming the longitudinal equations into the new variables then enables a partitioning as shown in eqn 4.138:
|
u |
" Xu g cos 0e/Ue |
Xw — g cos 0e/Ue Xq — We" |
u |
|||
|
d |
w 0 |
Zu g sin 0e/Ue |
Zw — g sin 0e/Ue Zq |
w 0 |
||
|
dt |
w |
Zu g sin 0e/Ue |
Zw — g sin 0e/Ue Zq + Ue |
w |
||
|
. q. |
|_Mu 0 |
Mw Mq _ |
q |
(4.138)
Following the weakly coupled system theory in Appendix 4A, we note that the approximating characteristic equation for the low-frequency oscillation can be written as
X2 + 2Zp oip X + o/p — 0 (4.139)
where the frequency and damping are given by the expressions (assuming Zq small and neglecting g sin ®e)
8
Xw — — cos 0e) (ZuMq — Mu(Zq + Ue))
![]()
![]() g „ rj Zw(ZuMq — Mu(Zq + Ue))
g „ rj Zw(ZuMq — Mu(Zq + Ue))
— cos 0^ Zu—————————————
Ue MqZw — Mw (Zq + Ue)
Similarly, the approximate characteristic equation for predicting the stability of the short period mode is given by
X2 + 2Ksp^spX + ^Sp = 0 (4.142)
where the frequency and damping are given by the expressions
2Ksp^sp = ~(Zw + Mq ) (4.143)
W2Sp — Zw Mq — (Zq + Ue)Mw (4.144)
The strong coupling of the translational velocities with the angular velocities in both short and long period modes actually results in the conditions for weak coupling being invalid for our hingeless rotor helicopters. The powerful Mu and Mw effects result in strong coupling between all the DoFs and the phugoid instability cannot be predicted using eqn 4.140. For the Puma helicopter, on the other hand, the natural modes are more classical, and very similar to a fixed-wing aircraft with two oscillatory modes becoming more widely separated as speed increases. Table 4.6 shows a comparison of the approximations for the phugoid
Table 4.6 Comparison of ‘exact’ and approximate longitudinal eigenvalues for Puma (exact results shown in parenthesis)
 |
 |
120 knots 140 knots 160 knots
and short period stability characteristics at high speed with the exact longitudinal subset results. The agreement is very good, particularly for the short period mode.
The short period mode involves a rapid incidence adjustment with little change in forward speed, and has a frequency of about 2 rad/s at high speed for the Puma. Increasing the pitch stiffness Mw increases this frequency. Key configuration parameters that affect the magnitude of this derivative are the tailplane effectiveness (moment arm x tail area x tail lift slope) and the aircraft centre of mass location. As noted in the earlier section on derivatives, the hub moment contribution to Mw is always positive (destabilizing), which accounts for the strong positive values for both Lynx and Bo105 and the associated major change in character of the longitudinal modes.
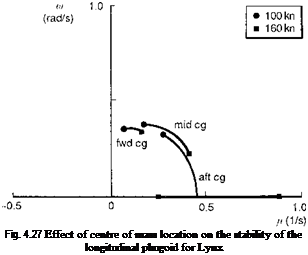 |
The significant influence of the aircraft centre of mass (centre of gravity (cg)) location on longitudinal stability is illustrated in Fig. 4.27, which shows the eigenvalue of the Lynx phugoid mode for forward (0.035 R), mid (0.0) and aft (-0.035 R) centre of mass locations as a function of forward speed. With the aft centre of mass, the mode has become severely unstable with a time to double amplitude of less than 1 s. At this condition the short period approximation, eqn 4.142, becomes useful for predicting this change in the stability
|
Table 4.7 Lynx stability characteristics with aft centre of mass
|
characteristics. The stiffness part of the short period approximation, given by eqn 4.144, is sometimes referred to as the manoeuvre margin of the aircraft (or the position of the aerodynamic centre relative to the centre of mass during a manoeuvre), and we can see from Table 4.7 that this parameter has become negative at high speed for the aft centre of mass case, due entirely to the strongly positive Mw. The divergence is actually well predicted by the short period approximation, along with the strong pitch subsidence dominated by the derivative Mq.
 Без верификации!")