Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




The aerodynamic theories described in the previous sections dealt with the linearized aerodynamic theories by assuming thin flat plates or by taking the quasi-steady
|
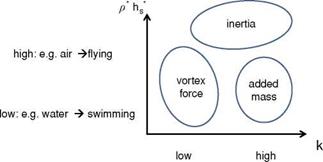
Figure 3.55. Schematic of the dominant mechanisms for force generation that is responsible for the wing deformation (see also Table 3.2) of a flexible flapping wing. Inertia force is the force acting on the wing due to the wing acceleration relative to the imposed motion at the wing root. |
assumption in inviscid flows. Exact solutions for the unsteady viscous flows described by the Navier-Stokes (see Eq. (3-18)), are unknown due to their non-linearity. Recently, numerical computations (e. g., [200] [296] [369]) and detailed experimental measurements (e. g., [199] [201] [323]) have revealed intriguing unsteady flow physics related to the flapping wing aerodynamics (see, e. g., Section 3). However, some key questions, such as the relation between the aerodynamic performance of flapping wings and the non-dimensional parameters introduced in Section 3.2, are still challenging.
Based on a control volume analysis of incompressible viscous fluid around a moving body [370] [371], Kang et al. [351] normalized the resulting hydrodynamic impulse term, which relates the vortices in the flow field to the force acting on the moving body, and the acceleration-reaction term, as shown in Eq. (3-35),
Cf = Cf, impulse + C^ ^ St O(1) + |o(1)j + StkO(1) (3-35)
as a first-order approximation. Note that the first term is independent of the motion frequency and the second term is proportional to 2n f. The force due to the hydrodynamic impulse scales with St. However, if the viscous time scale, c2mp/p-, is much greater than the motion time scale, 1/(2n f), such that Rek > 1, then the first term in Eq. (3-35) becomes negligible. Moreover, when the plunge amplitude ha/cm ~ St/k is small, the second term in Eq. (3-35) will make only a small contribution to the total force felt on the wing. In general, however, complex fluid dynamic mechanisms, such as the wing-wake interaction, or the wake – wake interactions would additionally affect the vorticity distribution in the flow field.
The last term of Eq. (3-35) is the acceleration-reaction term indicating the force due to the acceleration of the wing. When a body accelerates in a fluid, the fluid kinetic energy changes. The rate of work done by pressure moving the body yields the acceleration-reaction force. In an inviscid fluid this force is proportional to the acceleration (see, e. g., [372]). The constant of proportionality has the dimension of mass; hence, the name “added mass.” The added mass term is usually some fraction of the fluid mass displaced by the body. Determination of the added mass, which is a tensor because it relates the acceleration vector to the force vector, is not easy in general because the local acceleration of the fluid is not necessarily the same as the acceleration of the body [45]. However, for an accelerating thin flat plate with a chord length cm normal to itself, the force acting normal to the flat plate can be obtained as
PfFa = dt (pf 4 ’ (3-36)
where vi is the vertical velocity component: the added mass of a vertically accelerating thin flat plate is equal to the displaced fluid cylinder with radius cm/2. The added mass due to angular rotations can be obtained similarly, which results in the non-circulatory term as in Theodorsen, Eq. (3-21), or its quasi-steady approximation for the pure plunge motion, Eq. (3-22). Note also that the combination of non-dimensional numbers appearing in the previous formulas and in Eq. (3-35) is consistent.
This non-dimensionalization process reveals that the fluid dynamic force is proportional to St; hence, with increasing St, the force acting on the wing is expected to increase. Furthermore, if the motion is highly unsteady (i. e., к is high), the force due to the motion of the body, appearing as the acceleration-reaction component, dominates over the forces due to vorticity in the flow field.
A parametrization of special interest for the flapping wing community is the dependence of the force on the flapping motion frequency, m. The current scaling shows that for forward flight with Uref = UTO the acceleration-reaction force has the highest order of frequency as ~ (2n f )2. The resulting dimensional force is then proportional to the square of the motion frequency. Similarly, for hovering motions the current scaling shows that the non-dimensional force is independent of the motion frequency since the Strouhal number is a constant and the reduced frequency is only a function of flapping (plunging) amplitude. However, since Uref ~ (2n f )2 the resulting dimensional force is also proportional to the square of the motion frequency. Similar observations were reported by Gogulapati and Friedmann [367].
At a high Reynolds number, high reduced frequency regime, Visbal, Gordnier, and Galbraith [373] considered a high-frequency small amplitude plunging motion at Re = O(104) over a 3D SD7003 wing (a0 = 4 deg, к = 3.93, St = 0.06, Re = 1 x 104 and 4 x 104). They used the implicit LES approach to solve for the flow structures, including the laminar-to-turbulence transition and the forces on the wing. The flow field exhibits formation of dynamic stall features such as LEVs, breakdown due to spanwise instabilities, and transitional features; however the forces on the wing could still be well predicted by the Theodorsen [374] formula for lift. The time history of lift was “independent of Reynolds number and of the 3D transitional aspects of the flow field” [373]. Visbal and co-workers explained that the lift is dominated by the acceleration of the airfoil, which is proportional to the square of the motion frequency. This observation is also consistent with the fact that the scaling of the hydrodynamic impulse term is small compared to the acceleration-reaction term in Eq. (3-35) for the given non-dimensional parameters.
In contrast, at lower Reynolds numbers, Trizila et al. [301] showed at Re = 100 and к in the range of 0.25-0.5 that the formation and interaction of leading – edge and trailing-edge vortices with the airfoil and previous shed wake substantially affect the lift and power generation for hover and forward flight. Furthermore, three – dimensionality effects play a significant role. For instance, for a delayed rotation kinematics (к = 0.5, low angle of attack, Re = 100), the tip vortex generated at the tip of the AR = 4 flat plate would interact with the LEV, thereby enhancing lift compared to its two-dimensional counterpart; this is in contrast to the classical steady-state thin wing theory [301] [296] that predicts the formation of TiVs as a lift-reducing flow feature. This complex interplay between the kinematics, the wing-wake and wake – wake interactions, and the fluid dynamic forces on the wing at the given range of nondimensional parameters is also consistent with the scaling analysis described in this section as summarized in Table 3.2. The scaling shows that, for low reduced frequency motions or low Reynolds number flows, the hydrodynamic impulse term, which indicates the interaction between the vortices and the wing becomes important. In contrast, when the reduced frequency increases, the acceleration-reaction term dominates over the hydrodynamic impulse term. Both components are proportional to the Strouhal number. An interesting consequence that needs to be investigated
|
Table 3.2. Summary of the force scaling
|
more is that in the hovering flight condition where both the Strouhal number and reduced frequencies are independent of motion frequency, the normalized force will be independent of frequency for high Reynolds number flows.