
Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




As discussed in the previous section, the helicopter blade model has been used to help explain the flapping wing aerodynamics; however, spanwise axial flows are generally considered to have a minor influence on the helicopter aerodynamics [289] [375]. In particular, helicopter blades operate at a substantially higher Reynolds number and lower AoA than flapping wings. The much larger AR of a blade also makes the LEV harder to anchor. These are key differences between helicopter blades and typical biological wings.
Usherwood and Ellington [320] investigated the aerodynamic performance associated with “propeller-like” rotation of the hawkmoth wing model (Re = 0(103)). They reported that revolving models produced high lift and drag forces because of the presence of the LEV. Knowles et al. [376] performed computational studies involving with translating 2D and rotating 3D flat plate models at Re = 5.0 x 102. Their results showed, that for 2D flows, the LEV is unstable, but the rotating 3D flat plate model at high AoA produces a conical LEV, as observed in the results presented earlier and by others [320] [377]. Moreover, they noted that if the Reynolds number increases above a critical value, a Kelvin-Helmholtz instability [378] occurs in the LEV sheet, resulting in the sheet breaking down on outboard sections of the wing.
Lentink and Dickinson [379] revisited existing hypotheses regarding stabilizing the LEV. Using a fruit fly wing model, they systematically investigated the effects of propeller-like motion on aerodynamic performance and LEV stability at Re = 1.1 x 102-1.4 x 104 based on theoretical and experimental approaches. They stated that the LEV is stabilized by the “quasi-steady” centripetal and Coriolis accelerations that are present at low Rossby numbers (i. e., a half of the AR) and result from the propeller-like sweep of the wing. In addition, they suggested that the force augmentation through a stably attached LEV could represent a convergent solution for the generation of high fluid forces over a range of Reynolds numbers.
Jones and Babinsky [380] experimentally examined unsteady lift generation on rotating wings with AoA of 5° and 15° at a Reynolds number of 6.0 x 104. A transient high list peak, approximately 1.5 times the quasi-steady value, occurred in the first chord length of travel, and it was caused by the formation of a strong LEV. They showed that wing kinematics has only a small effect on the aerodynamic force produced by the waving wing. In the early stages of the wing stroke, the velocity
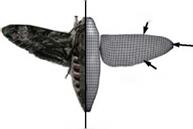
![Подпись: Figure 3.56. A morphological model of a hawk- moth, Agrius convolvuli, with a computational model superimposed on the right half. The hawk- moth has a body length of 5.0 cm, a wing length of 5.05 cm (mean wing chord length cm = 1.83 cm), and an aspect ratio of 5.52. The image is from Aono, Shyy, and Liu [384].](/img/3131/image333_3.gif) |
 profiles with low accelerations affect the timing and the magnitude of the lift peak, but at higher accelerations, the velocity profile is insignificant.
profiles with low accelerations affect the timing and the magnitude of the lift peak, but at higher accelerations, the velocity profile is insignificant.
From the viewpoint of unsteady aerodynamics, the LEV as a lift-enhancement mechanism at a higher Re range (0(105-106)) may be questionable because a dynamic stall vortex on an oscillating airfoil is often found to break away and to convect elsewhere as soon as the airfoil translates [277].
3.6 Modeling of Biological Flyers in a Rigid-Wing Framework
There are a number of computational studies based on realistic wing configurations of natural flyers, such as a hornet [381], bumblebee [382] [383], hawkmoth [200] [247] [384], honeybee [225], drone fly [385], hover fly [386], fruit fly [387], and thrips [225]. In following, we present selected examples to highlight some of the features discussed in previous sections, as well as to gain insight into how flow structures are associated with the specific characteristics of wing motion.
