Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




The third aspect in this section is concerned with the sensitivity of aircraft, crew, weapon system, passengers or equipment to atmospheric disturbances, taken together under the general heading – ride qualities. Reference 5.57 discusses the parameters used to quantify ride bumpiness for military fixed-wing aircraft, in terms of the normal acceleration response. For helicopter applications, the meaning of ride qualities, in terms of which flight parameters are important, is a powerful function of the aircraft role and flight condition. For example, the design of a civil transport helicopter required to cruise at 160 knots may well consider the critical case as the number of, say, 1/2 g vertical bumps per minute in the passenger cabin when flying through severe turbulence. For an attack helicopter the critical case may be the attitude perturbations in the hover, while cargo helicopters operating at low speed with underslung loads may have flight path displacement as the design case. For the first example quoted, a direct parallel can be drawn from fixed-wing experience. In Ref. 5.57 Jones promotes the application of the SDG method to aircraft ride qualities in the following way. We have already introduced the concept of the tuned gust, producing the maximum or tuned transient response. Based on tuned gust analysis, the predicted rate of occurrence of vertical bumps can be written in the form
where
ny is the average number of aircraft normal acceleration peaks with magnitude greater than y, per unit distance flown;
a and в reflect statistical properties of the patch of turbulence through which the aircraft is flying;
H is the tuned gust scale (length);
Y is the tuned response (Fig. 5.35(c)); к is the gust length sensitivity.
In addition to its relative simplicity, this kind of formulation has the advantage that it caters for structured turbulence and hence structured aircraft response. The approach can be extended to cases where the gust field is better represented by gust pairs and other more complicated patterns, with associated complex tuning functions. The basis of the SDG method is the assumption that structured atmospheric disturbance is more correctly and more efficiently modelled by localized transient features. The wavelet
|
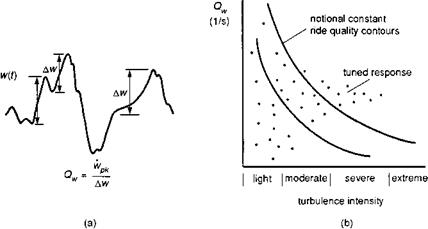
Fig. 5.36 Transient response quickness as a ride qualities parameter: (a) quickness extraction; (b) quickness chart |
analysis has provided a sound theoretical framework for extending the forms of transient disturbance and response shape to more deterministic analyses. At the same time, new handling qualities criteria are being developed that characterize the response in moderate amplitude manoeuvres, also in terms of transient response. The so-called attitude ‘quickness’ (Ref. 5.58), to be discussed in more detail in Chapter 6, represents a transient property of an aircraft’s response to pilot control inputs. The same concept can be extended to the analysis of the aircraft response to discrete gusts, as summarized in Fig. 5.36. The response quickness, shown in Fig. 5.36(a) applied to the normal velocity response, is extracted from a signal by identifying significant changes (Aw – strictly the integral of acceleration) and estimating the associated maximum or peak rate of change, in this case peak normal acceleration (aZpk); the quickness associated with the event is then given by the discrete parameter
az,
Qw = (5.84)
Aw
Clearly, each discrete gust has an associated quickness, which actually approximates to 1/L in the limit of a linear ramp gust. Quickness values can then be plotted as points on charts as shown in Fig. 5.36(b). In this case we have plotted the values as a function of the gust input intensity, assuming a unique relationship between the input-output pair. Bradley et al. (Ref. 5.44) have shown that the quickness points group along the tuning lines, related to у, as shown in hypothetical form in Fig. 5.36(b). Also shown in the figure are contours of equi-responsiveness or equi-comfort which suggest a possible format for specifying ride quality.
The ongoing research on the topic of ride qualities is likely to produce alternative approaches to modelling and analysing disturbance and response, derived as ever from different perspectives and experiences. The key to more general acceptance will certainly be validation with real-world experience and test data, and it is in this area that the major gaps lie and much more work needs to be done. There are very few sets of test data available, and perhaps none that is fully documented, that characterize the disturbance and the helicopter response to turbulence in low-level nap-of-the-earth flight; it is a prime area for future research. Data are important to validate simulation modelling and also to establish new ride criteria that can be used with confidence in the design of new aircraft and the associated automatic flight control systems. The current specification standards for rotorcraft handling do not make any significant distinction between the performance associated with the response to controls and disturbances. Clearly, an aircraft which is naturally agile is also likely to be naturally bumpy, and an active control system will need to have design features that cope with both handling and ride quality requirements. Fortunately, the handling qualities standards, perhaps the more important of the two, are now, in general, better understood, having been the subject of intense investigations over the last 15 years. Handling qualities forms the subject of the remaining two chapters of this book.

The Canadian NRC variable stability (fly-by-wire) Bell 205 during
a handling qualities evaluation near Ottawa
(Photograph from the author’s collection)