Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




This chapter is concerned with those flying qualities characteristics that can be quantified in parametric, and hence, numerical, terms. A range of new concepts in quality discrimination were established during the 1980s and are now taking a firm hold in the development of new projects in both Europe and the United States. Some background interpretation and discussion of the development rationale are provided from the author’s own perspective, particularly relating to the quantitative criteria in the US Army’s ADS-33. Before ADS-33, the existing mandatory and even advisory design criteria were so ill-matched to the high performance helicopter that achieving compliance with these in simulation provided little insight into problems that might occur in flight. Furthermore, aircraft that demonstrated compliance during flight test could still be unfit for their intended role. These two paradoxical situations have prevailed since design criteria were first written down and their continued existence can be tolerated only on two counts. First, there is the argument that criteria should not constrain the design creativity unduly and, second, that handling qualities of new designs in new roles should not be prejudiced by a limited database derived from older types. These two points should serve to alert us to the need for living requirements criteria that are robust; the term robust is applicable in this context to requirements that meet the so-called CACTUS rules (Ref. 6.14), namely
(1) Complete – covering all missions, flight phases and response characteristics, i. e., all the internal and external influencing factors;
(2) Appropriate – the criteria formats should be robust enough to discern quality in the intended range of application (e. g., frequency domain rather than time domain criteria for pilot-induced oscillation (PIO) boundaries);
(3) Correct – all Level 1/2 and 2/3 quality boundaries should be positioned correctly;
(4) Testable – from design through to certification;
(5) Unambiguous – clear and simple, easy to interpret; perhaps the most challenging of the rules, and vital for widespread acceptance;
(6) Substantiated – drawn and configured from a database derived from similar types performing similar roles; perhaps the single most important rule that underpins the credibility of new criteria.
Striving to meet the CACTUS rules is recognized as a continuing challenge for the flying qualities engineer as roles develop and new data become available. The criteria discussed in this chapter conform to the rules to varying degrees, some strongly, some hardly at all; we shall attempt to reflect on these different levels of conformity as the chapter progresses.
Turning to the framework of ADS-33, Table. 6.1 provides an overview snapshot for selected MTEs. The figure links together the key innovations of the specification – the response types (RT), the mission task elements (MTE) and the usable cue environment (UCE). The UCE, derived from pilot subjective ratings of the quality of visual task cues, will be discussed in more detail later in Chapter 7. Its introduction into ADS-33 draws attention to the need for different flying qualities in different visual conditions, in particular in so-called degraded visual environments (DVE), when flying close to the ground. A UCE of 1 corresponds to conditions where the pilot has very good visual cues to support the control of attitude and velocity, while a UCE 3 corresponds to conditions where the pilot can make small and gentle corrections only because of deficient visual cues. Table 6.1 tells us that to achieve Level 1 flying qualities in the selected MTEs, rate command is adequate in a UCE 1 while the requirements become more demanding in poorer UCEs. Attitude command is required for pitch and roll in a UCE of 2 and translational rate command with position and height hold for a UCE 3.
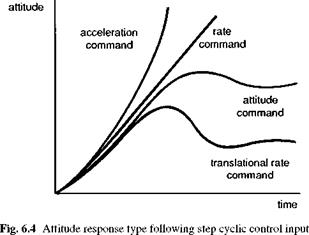
The RT relates to the character of the response in the first few seconds following a pilot-applied step control input. Figure 6.4 shows how the attitude varies for the
|
Table 6.1 Response-type requirements in different usable cue environments for selected MTEs
|
|
RC – |
rate command |
rapid bob up/down, hover turn, |
|
TC – |
turn coordination (applies to yaw and pitch response) |
rapid transition to precision hover, sonar dunking, rapid |
|
ACAH – |
attitude command, attitude hold (roll and pitch) |
sidestep, rapid accel-decel, |
|
RCDH – |
rate command, direction hold (yaw) |
target aquisition and tracking, |
|
RCHH – PH – TRC – |
rate command, height hold (heave) position hold (horizontal plane) translational rate command |
divided attention tasks |
|
|
different types in pure form, including for completeness, the acceleration RT. Rate Command (RC) response is generally regarded as the simplest practical type found with conventional helicopters. The definition of rate command in ADS-33 actually allows for variations in the response away from the pure rate to include the variety of current helicopters that do not fall neatly into the pure categories but still exhibit satisfactory handling qualities. A basic requirement is that the initial and final cockpit controller force, following an attitude change, shall be the same sign. As the RTs become more directly related to translational response, two associated factors impact the pilotage. First, attitude command (AC) is easier to fly than RC, and translational rate command (TRC) is easier to fly than attitude command, attitude hold (ACAH). With TRC, not only is the attitude loop automatically closed, thus relieving the pilot of the higher gain-attitude stabilization, but also the velocity feedback loop is automatically closed, reducing piloting essentially to a steering task. Second, the additional stability is achieved at the expense of manoeuvrability and agility. The highest performance can, in principle, be achieved with an acceleration command RT through a direct force/moment inceptor, but the pilot would have to work so hard (performing three mental integrations) to achieve flight path accuracy that the additional performance ‘available’ would almost certainly be wasted. As the RT becomes progressively more stable, the available manoeuvre performance envelope reduces. This is completely in accord with the need for the higher levels of augmentation, of course. Pilots will not normally require high performance in DVE. The different requirements highlighted by Table 6.1 reinforce the importance of task in the quality of flying. But it is not sufficient to define the RT; the detailed character of the response in the short-long term and at small-large amplitude needs quantifying. We need a framework for this deeper study of response quality.
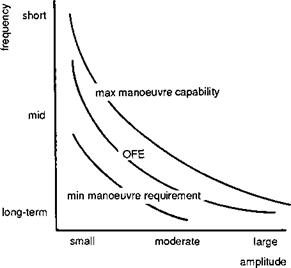
Figure 6.5 illustrates a convenient division of aircraft response characteristics on one of our reference diagrams, showing response frequency against amplitude. The discriminators – large, medium and small for amplitude and long, mid and short term for frequency – are intended to encompass, in a meaningful and systematic way, all of the task demands the pilot is likely to encounter. The framework includes the zero and very low frequency trim, and the zero and very low amplitude stability areas. A third dimension, cross-coupling, is added to highlight that direct response characteristics are insufficient to describe response quality fully. The hyperbolic-like boundary shows how the manoeuvre envelope of an aircraft is constrained – as the amplitude increases, then various physical mechanisms come into play that limit the speed at which the manoeuvre can be accomplished, e. g., control range, actuator rate, rotor thrust/moment capability, etc. The boundary represents the dynamic OFE and flying qualities criteria are required across the full range of frequency and amplitude.
This chapter is primarily concerned with the characteristics required to confer a helicopter with Level 1 flying qualities, although we shall give some attention to Level 2 characteristics since most operational helicopters spend a considerable time in Level 2.
|
Fig. 6.5 Equi-response contours on the frequency-amplitude plane |
Within the sections, each of the four primary response axes will be discussed – roll, pitch, yaw and heave, along with the variety of different cross-coupling mechanisms. The other important internal factors, inceptors and displays, will be discussed in Chapter 7; they both have strong influences in flying qualities, particularly for flight in degraded visual conditions and at flight envelope limits where tactile cueing through the pilot’s controls is particularly important. Where appropriate, some comparison with fixed – wing aircraft criteria and quality boundaries will be made. A as the reader embarks on this chapter, it is worth noting that while considerable progress has been made with helicopter flying qualities criteria between the mid-1980s and early-1990s, the evolutionary process is continuing. At the time of writing the second edition of this book the same is true, and some of the developments, particularly the requirements criteria in ADS-33, are summarized in Section 6.9. Chapter 8 addresses degraded handling qualities. The author has had to be selective with the material covered in view of the considerable amount of relevant published work in the literature. This comment is particularly germane to the coverage given to ADS-33 criteria; readers are earnestly referred to these design guidelines and associated references in the open literature for a more precise and complete definition of handling boundaries. We begin with the roll axis and this will allow us to introduce and develop a range of concepts also applicable to the other axes of control.