Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




Control sensitivity is a measure of the initial angular acceleration of the aircraft following a step input command, is traditionally measured in rad/s2 in, and is recognized as a primary parameter affecting pilot opinion of aircraft handling. ADS-33 does not dispute this but says that, ‘all controller sensitivities shall be consistent with the aircraft dynamic response characteristics in each axis at all flight conditions’; no criteria for the acceleration sensitivity are given. This is not difficult to live with for simple first-order-type responses where the control sensitivity is given by the product of the bandwidth and control power. In simple derivative language, the sensitivity would then be related to the control derivative through the control gearing, i. e.,
(01c max)^ вс = —psLp (6.18)
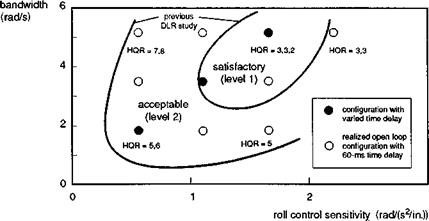
For simple response types, the requirements on sensitivity are therefore defined by those for response characteristics already discussed. The most obvious interpretation of this relationship was given by Edenborough and Wernicke (Ref. 6.53) who first attempted to define requirements for roll control characteristics for combat helicopters. The boundary lines are shown in the earlier Fig. 6.23, with a minimum sensitivity level of 1 rad/(s2 in) and an increasing range of acceptable sensitivities for increasing roll damping. The upper limits on sensitivity reflect the fact that the initial response can be too jerky as well as too sluggish. In Fig. 6.23, the boundaries from a variety of different studies, conducted over the last few decades, illustrate the wide range of sensitivity that appears to be acceptable. In Ref. 6.54, Pausder and Von Grunhagen map quality boundaries onto a similar diagram, based on flight data from the DLR ACT Bo105, replacing roll damping with bandwidth (Fig. 6.37). This would seem to be the most suitable format for relating the short-term response to the sensitivity but, like all the other criteria we have discussed, will almost certainly have different boundary lines for different types of MTEs. Note that the minimum bandwidths for Level 1 and 2 handling qualities do not conform to the ADS-33C boundaries. A second series of in-flight experiments to explore sensitivity boundaries is reported in Ref. 6.55, based on tests with the Canadian ACT Bell 205. The authors of this work argue that a more meaningful measure of sensitivity is the rate sensitivity (measured in °/(s in)), rather than the control sensitivity. Note that on Figs 6.23 and 6.37, the rate sensitivity is constant along radial lines. The results presented in Ref. 6.55 confirm that there is a range of acceptable sensitivities for given bandwidth, but with much sharper
|
Fig. 6.37 Handling qualities boundaries for bandwidth versus control sensitivity (Ref. 6.54) |
degradations for reducing sensitivity than increasing. This may reflect the difference between configurations that are becoming impossible to fly and those that are merely difficult. One thing that seems clear from all studies on sensitivity is that the lower the bandwidth, the narrower the range of acceptable sensitivities. The results in Fig. 6.37 suggest that the Level 1 boundary may be a closed contour, as postulated by Edenbor – ough and Wernicke (Ref. 6.53), reflecting the potential for having an over-responsive aircraft. To date, insufficient attention has been given to this topic to give clear guidance, but there are parallels with fixed-wing flying qualities where very high-performance fighter aircraft do have prescribed upper limits on sensitivity and bandwidth (Ref. 6.6).
But there is another major influence on the quality of control or rate sensitivity – the characteristics of the pilot’s controller or inceptor. Even conventional centre sticks can vary in shape and size and, given the control power requirements, the sensitivity is dependent on the size of the control throw. With the advent of sidestick controllers, the sensitivity requirements have become even more complicated. Early research into sidesticks for helicopters soon established the need for nonlinear shaping of the re- sponse/control deflexion relationship (Refs 6.56-6.58). For small displacement controllers with linear response gradients, pilots find that the sensitivity for small amplitude inputs is too high to allow smooth control actions, and a much reduced gradient near centre is required. To allow a high control power to be achieved at maximum control throw, the gradient will then typically have to increase several-fold with the possibility of too high a sensitivity at larger displacements. There are many flying qualities issues that are accentuated with sidesticks, and we devote more discussion to these in Chapter 7. So we leave sensitivity, a vital influence but still something of a mystery, with very little data to substantiate well-defined quality boundaries. Perhaps it is as well that such a critical parameter is left for the engineer and pilot to optimize in the design phase.
Staying with small amplitude motions we now increase the timescale to discuss a facet of helicopter flying qualities that is perhaps the most notorious, if not the most critical, of all – stability.