Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




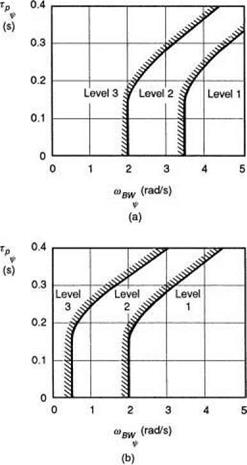
The heading response bandwidth requirements are presented in Figs 6.64(a) and (b). The higher performance required for tracking tasks is common to both hover/low – speed and forward flight MTEs, e. g., Level 1 boundary at 3.5 rad/s. Such high values of bandwidth do not occur naturally in helicopters; typically, the yaw axis has very low damping, particularly at low speed, with rise times of the order of 2 s (see Chapter 4). The results of Refs 6.77 and 6.78 have already indicated the levels of damping that pilots feel are appropriate for aggressive yaw tasks. Bandwidths of 3.5 rad/s and higher are more consistent with rise times of the order 0.5 s and hence require some form of response quickening control augmentation.
|
Fig. 6.64 Yaw axis bandwidth/phase delay boundaries (Ref. 6.5): (a) (low speed) target acquisition and tracking – (forward flight) air combat (yaw); (b) general MTEs |