Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




The application of collective pitch causes the rotor to slow down (or speed up) and the governor to increase (or decrease) the fuel flow, hence to increase (or decrease) the engine torque, which in turn results in a yawing moment reaction on the fuselage. Helicopter pilots learn to compensate for this effect early in their training and need to allocate a certain level of compensatory workload for harmonious inputs in pedal when applying collective. Most helicopters are built with a mechanical interlink between tail rotor collective pitch and main rotor collective lever, hence nullifying the gross effects at one particular flight condition. ADS-33 sets a limit of maximum yaw rate excursions of 5°/s following abrupt collective inputs, and also sets more complex limits on the ratio of yaw rate to vertical velocity, for which no substantiating data have appeared in the open literature; readers are referred to Ref. 6.5 for details.
6.7.2 Sideslip to pitch and roll coupling
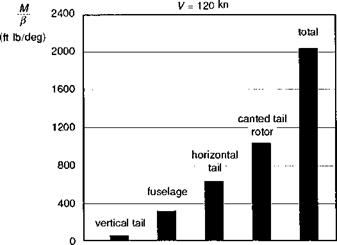
The remaining cross-coupling effect to which we give some attention is the attitude response to sideslip. Pitch response to sideslip is a peculiar helicopter phenomenon that can lead to control problems in uncoordinated manoeuvres when it is required to point the fuselage off the flight path. The rotor downwash field can affect the horizontal stabilizer giving a powerful nose-up pitching moment in zero sideslip conditions. As sideslip builds up, the wake washes off to one side, exposing the tail to free air and leading to pitch down moments in both port and starboard manoeuvres. Figure 6.69, taken from Ref. 6.87, illustrates the various contributions to the pitching moment due to sideslip on the UH-60 helicopter. The canted tail rotor contributes 50% of the strong cross-coupling and the horizontal stabilizer, contributes 25%. The overall value for the derivative Mp is about 2000 ft lb/° and is equally as powerful as main rotor cyclic
|
Fig. 6.69 Contribution of aircraft components to the pitching moment due to sideslip – UH-60 (Ref. 6.87) |
control, therefore requiring significant pilot compensation. A strong pitch response to sideslip can exacerbate pilot disorientation problems following tail rotor failures. To the author’s knowledge there are no published data defining handling qualities boundaries for sideslip to pitch effects; it remains a topic for future research.
Roll-sideslip coupling is defined in ADS-33 as part of the forward flight criteria for lateral/directional oscillatory characteristics (Ref. 6.5). It follows the fixed-wing format and is expressed in terms of the ratio of the oscillatory to the average component of roll attitude response following a lateral cyclic control input. The assumption with this type of format is that the roll oscillations are caused by sideslip excursions in a roll manoeuvre. The Level 1/2 boundary for this parameter depends on the phase angle between roll and sideslip.
Two final points need to be made on cross-coupling in general. First, it should be stated that most helicopters are designed with mechanical interlinks, or control couplings, that minimize the initial coupled motions following abrupt control inputs. In both the Sikorsky CH-53E and UH-60A, for example, application of collective lever couples to all the remaining controls through mechanical interlinks. This is a relatively simple and effective way of reducing some of the primary effects, but does nothing about the rate and velocity couplings. Second, there is evidence that the maximum level of acceptable coupling is a strong function of on-axis response characteristics – the poorer the on-axis handling qualities, the less tolerant pilots are of coupling. This is consistent with the intuitive rule that the presence of more than one degrading handling influence will lead to a combined handling worse than the average of the individual characteristics. This is bad news of course, but shouldn’t come as a surprise to any pilot who has tried to ‘tighten-up’ on the controls with an unstabilized or partially stabilized helicopter, or tried to define a Level 1 roll axis response boundary, with a configuration having Level 2 pitch or cross-coupling characteristics. But future helicopters with active control technology will have low levels of couplings by design. What does need consideration with these highly augmented aircraft is the level of
mission criticality and even flight criticality of the coupling augmentation. Future pilots may not be as well trained to fly cross-coupled helicopters, and loss of augmentation may be analogous to engine or tail rotor failure in today’s helicopter operations. The central issue then becomes one of system integrity, particularly relating to sensors, and sufficient integrity/redundancy needs to be incorporated so that the risk of loss of coupling augmentation is remote.