Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




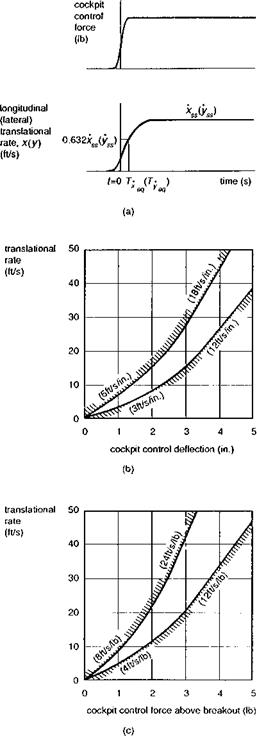
The unique capability of helicopter flight in three dimensions is typified by low-speed manoeuvring close to the ground. The pilot’s task can be conceptually divided into three subtasks – navigation, guidance and stabilization. Navigation, or generally where the pilot wants to go in the long term, requires low workload and intermittent attention by the pilot to make course corrections. Guidance relates more to where the pilot wants to go in the shorter term and requires moderate levels of workload that depend principally on the speed of flight and on the level of visibility, or how many flight seconds the pilot can see ahead. In poor visibility and at low level the guidance workload can become very high. Stabilization relates to the continuous activity and workload to maintain the required aircraft attitudes. With unaugmented helicopters, the stabilization workload can be high and requires continuous pilot compensation as the helicopter is disturbed and deviates from the intended flight path. Most of the effort into augmentation for supporting precise flight path control close to the ground and obstacles has been directed towards reducing the stabilization workload by incorporating attitude hold functions, in combination with rate command, or even attitude command response types. For example, both Puma and Lynx have short-term attitude hold as part of their limited authority SCAS, triggered when the attitude falls within a small range close to zero (Lynx), or the pilot’s cyclic is stationary (Puma). With the advent of high authority digital flight control, the capability now exists for providing response types that not only remove the stabilization workload, but also directly support the guidance task. Conceptually, the pilot requires control over the magnitude and direction of the aircraft velocity vector. To date the only criterion developed for flying qualities in the guidance task has been the TRC response type required for operations in the DVE according to ADS-33 (Ref. 6.5). TRC refers to a response characteristic where constant pilot controller input leads to a proportional earth-referenced translational velocity response. Level 1 flying qualities are defined by a TRC response having a qualitative first – order shape and equivalent rise time of between 2.5 and 5 s. The lower limit is set to avoid abrupt attitude changes during TRC manoeuvres. Equivalent rise time and the Level 1 TRC control power and sensitivity boundaries are defined as shown in Fig. 6.70. The limited supporting data for TRC response characteristics are published in Ref. 6.32.
Two notable examples of the implementation of novel response types are worth highlighting – the advanced digital flight control system (ADFCS) implemented in the McDonnell Douglas experimental AH-64 Apache AV05 (Ref. 6.88) and the Velstab System designed for the production Boeing/Sikorsky RAH-66 Comanche (Refs 6.89, 6.90). The philosophy behind the ADFCS experimental system, designed and flown in the mid-late 1980s, was to provide low workload management of aircraft control for single-pilot operations. The provision of automatic moding was part of this philosophy, hence not ‘trading flight path with button management’. The flight path control logic implemented in AV05 comprised two selectable modes – the flight path vector system (FPVS) and aerobatic system. The control logic for the FPVS contained many
|
|
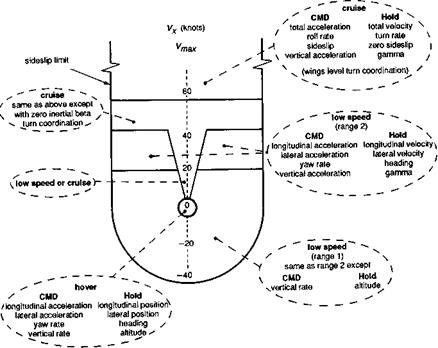
Fig. 6.71 Polar plot of speed/azimuth control logic for FPVS AH-64 (Ref. 6.88) |
innovative features as summarized in Fig. 6.71, showing three auto-transition modes for hover, low speed and cruise. In the low-speed mode, (translational) inertial acceleration is commanded with the right-hand controller, with inertial velocity hold. This response type was selected for low-speed NoE flight to ensure that pilots would not be required to hold stick forces for long periods, as would occur with a pure TRC system. In the cruise mode, the turn rate hold feature gives the pilot the ability to maintain relative flight paths while changing speed. In both low-speed and cruise modes, the vertical axis response type of acceleration command/flight path hold simplified the task of terrain flight – the pilot could place the flight path vector symbol in the helmet-mounted display on the desired point on the terrain, e. g., hill top, to ensure clearance of vertical obstacles. In the author’s view, AV05 represented, in its day, the state of the art in a full flight envelope ACT system with novel response types. To quote from Ref. 6.88, ‘… non-pilots could command near envelope limit performance from the aircraft in the course of a one hour demonstration flight’; the present author can testify to this, as he was one of the privileged engineers to fly AV05 in exactly this fashion.
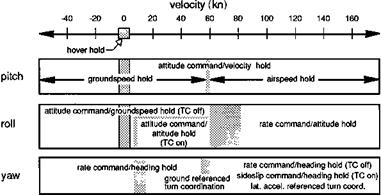
At the time of writing the first edition of this book, the core active flight control system (AFCS) of the RAH-66 Comanche had been demonstrated in piloted simulation to confer Level 1/ good Level 2 flying qualities for the UCE 1 ADS-33 MTEs (Ref. 6.89). In addition, the selectable control modes, giving the pilot hybrid ACVH (attitude command, velocity hold) for flight in DVE, were evaluated as solid Level 1 for the ADS-33 DVE MTEs (Ref. 6.90). On the RAH-66, the DVE control system is described as the VELSTAB mode, and the characteristics relative to inertial groundspeed (V <60
|
Fig. 6.72 Comanche VELSTAB characteristics (Ref. 6.90) |
knots)/airspeed(V > 60 knots) are illustrated in Fig. 6.72 (from Ref. 6.90). At very low speed (groundspeed within ±5 knots), in the shaded hover-hold region on Fig. 6.72, TRCPH is provided, giving the pilot a precise positioning aid. Hover-hold break-out is enabled when the pilot demands a velocity outside the threshold or applies a large cyclic demand. Below 60 knots groundspeed, the pilot flies with ACVH, with wind compensation to eliminate, as far as possible, non-uniformities in the required pilot control strategies in windy conditions, and to ensure a smooth blend between ground and airspeed at 60 knots. Low-speed turn coordination combined with altitude hold allows the pilot to fly single handed with the aircraft body axis always aligned with the flight path.
ADFCS on the Apache and AFCS with VELSTAB on the Comanche are visions of things to come in helicopter flight control and flying qualities, which have been realized successfully in flight and simulation. Flight with novel ground-referenced response types is being enabled by advances in sensor and digital flight control system technologies and clearly offers the potential for significant reductions in pilot workload, particularly for flight in DVE. The military driver is to provide capabilities previously not possible, but significant safety improvements in civil operations in poor visibility or congested and/or confined areas are also likely to be realized with this technology.