Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




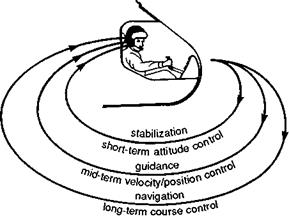
To initiate the discussion it is useful to reflect on the piloting task and to review our previous classification into three subtasks – navigation (and general situation awareness), guidance and stabilization. The discussion will be aided by Fig. 7.25 showing the pilot performing as the feedback element in the closed-loop task. Navigation is concerned with knowing where you are and where you are going – the very outer loop in Fig. 7.25, with typical time/space scales measured in min/km. Most of the time, the pilot will not
|
|
be concerned with applying control actions to support the navigation function. Typically, he will be following maps that lead him from one ‘way-point’ to the next, when he applies control to direct the aircraft on to the next heading and perhaps speed and height. Flying at low level and in the nap of the earth (NoE) makes considerably more demands on piloting, particularly on the inner-loop functions. The guidance function works within time/space scales of a few seconds and tens of metres and is concerned with avoiding obstacles and the ground. The closer the pilot has to fly to obstacles, the more arduous the guidance task becomes and, typically, the slower the groundspeed selected. A general rule of thumb is that pilots will select a speed that gives them a perception – action timeframe of between 3 and 5 s. Hence, a 3-s pilot may elect to fly at 40 knots to give a 60-m straight line see-ahead distance for avoiding obstacles. At 80 knots the same pilot would need to be able to see 120 m ahead. These are minimum distances and pilots normally fly with much greater safety margins. In the same terrain, for example, a different pilot may prefer to fly with less urgency, making more spare capacity available for observation, and chose to fly at 20 knots, giving a 3-s to fly 30 m, or 6-s see-ahead time in a DVE with a 60-m visibility. Similarly, the vertical flight path excursions caused by disturbances will increase with increasing forward speed, forcing the pilot to fly higher to maintain the same level of safety. In the NoE, a general rule is to trade feet for knots – 10 knots at a height of 10 ft, 60 knots at a height of 60 ft. The selected overall piloting strategy for guidance will depend on a number of factors – pilot familiarity with the terrain and experience of NoE flying, the aircraft response characteristics, the level of task urgency and last, but perhaps most important of all, the quality of the OVCs. This is the cue to the main subject of this section but before discussing flying qualities in the DVE in more detail, we need to examine the third, and perhaps most, distinguishing feature of helicopter pilotage – stabilization.
Automobile drivers are generally unconcerned with stability, except in tight curves or on slippery surfaces, or perhaps with faulty steering/uneven tyre wear or balance. However, without some form of artificial stability augmentation, helicopter pilots need to make continual corrections with their controls to ensure that the aircraft does not depart from a prescribed flight path. Different helicopters have their own particular stability characteristics and problems, but most suffer from natural instabilities in both longitudinal and lateral motions that are difficult to cure completely with limited authority artificial stability augmentation. Control of instabilities is primarily achieved through attitude as illustrated in Fig. 7.25 and often requires the pilot to be continuously attentive to flight path control, hence contributing significantly to pilot workload.