Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




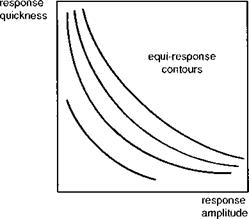
Conferring operational agility on future rotary-wing aircraft, emulating configuration C above in Fig. 7.20, requires significant improvements in handling, but research into criteria at high-performance levels are needed to lead the way. A natural agility parameter has developed as one of the ADS-33 innovations – the response quickness. We have already discussed the properties of this parameter in Chapter 6 but it is useful to take a closer look at the effect of this and other handling parameters on the equi- response charts shown in Fig. 7.21. For a simple illustration we refer back to the CSM
|
model structure for roll rate command response type
![]()
![]() K e-Ts
K e-Ts
0 (— + 0
J^a )
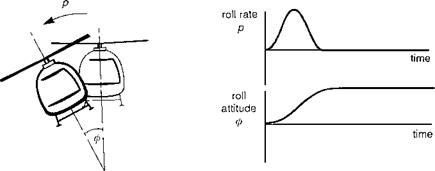
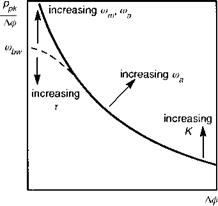
If we interpret the frequency axis as roll response quickness as shown in Fig. 7.21, the effect of independent variation of the different parameters in eqn 7.4 can be illustrated as in Fig. 7.22. The sensitivity of agility factor with the parameters of the CSM is relatively easy to establish. For example, if we consider a bank and stop MTE (Fig. 7.23), some useful insight can be gained. A pulse-type control input will be assumed, although, in practice, pilots would adopt a more complex strategy to increase the agility factor. To illustrate the primary effect, we consider the case where the ‘secondary’ time delays are set to zero (i. e., т = 0, rna = те). For a roll angle change of Аф, the ideal
|
|||
|
|||
|
|||
|
|||
|
|||
|
|
||
|
|||
|
|||
|
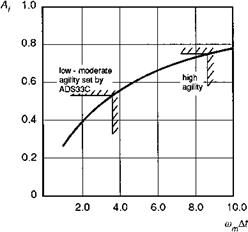
the sensitivity of Af to both bandwidth and quickness. The normalized bandwidth is a useful parameter as it represents the ratio of aircraft bandwidth to control input bandwidth, albeit rather approximately. For short, sharp control inputs, typical in tracking corrections, high aircraft bandwidths are required to achieve reasonable agility factors. For example, at the ADS-33C minimum required roll attitude bandwidth of 3.5 rad/s and with 1-s pulses, the pilot can expect to achieve agility factors of 0.5 using simple control strategies in the bank and stop manoeuvre. To achieve the same agility factor with a 0.5-s pulse would require double the bandwidth. This is entirely consistent with the argument that the ADS-33C boundaries are set for low to moderate levels of attack. If values of agility factor up to 0.75 are to be achieved, it is suggested as in Fig. 7.24, that bandwidths up to 8 rad/s will be required. Whether the 30% reduction in task time is worth the additional effort and cost to develop the higher bandwidth can be judged only in an overall operational context. Such high values of roll bandwidth may be achievable in very high performance fixed-wing aircraft and Fig. 7.24 serves to illustrate and underline the different operational requirements of the two vehicle classes, and also, to a large extent, the different expectations of the operators.
This simple example has many questionable assumptions, but the underlying point that increasing the key flying qualities parameters above the Level 1/2 boundary has a first-order effect on task performance still holds. But it provides no clues to possible upper performance boundaries set by flying qualities considerations. Existing requirements do not address upper limits directly, and more research with high-performance variable stability helicopters is required to address this issue. Intuitively, we might expect upper limits to be related to the acceleration capability of the aircraft (Ref. 7.25). This is largely the case with fixed-wing aircraft but there are also tentative upper limits on pitch attitude bandwidth (see Figs 6.43, 6.44). However, it is suspected that these are actually a reflection of the high control sensitivity required to achieve a defined level of control power, rather than the high values of bandwidth per se. Upper limits on control sensitivity are typically set to reduce the jerkiness or abruptness for small amplitude precision control, but the numerical values depend very much on the incep – tor characteristics. Regarding the moderate and large amplitude motions, the best we can say at the moment is that the parameters on the quickness-amplitude charts are likely to have upper bounds beyond which agility would deteriorate.
Agility is a special flying quality catering for extreme operational requirements and a key technology driver for military functions. At the other end of the spectrum we find another, equally demanding, requirement for flight in very poor visibility. Here the pilot is not so much interested in agility as increased stabilization and the enhancement of his visual cues for the guidance task. Flight in degraded visual conditions exemplifies the tension and contrast between stability and agility requirements and is pressing hard on cockpit-related technologies that support pilotage; it is also the next topic of investigation.