Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




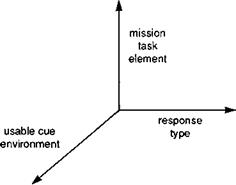
ADS-33 addresses these issues through the requirement for different response types (effectively the stabilization level) in different usable cue environments (UCE) to ensure Level 1 flying qualities. Of course, the quality levels still depend upon what the pilot is trying to achieve in terms of MTE, and Fig. 7.26 illustrates conceptually the three dimensions associated with this problem. We have briefly reviewed some of the issues involved previously in Chapters 2 and 6, but with this discussion of flying qualities in the DVE we are at the heart of the UCE concept and can give it more attention. One of the first discussions on the need for a more elaborate structure to define the quality of visual cues for rotorcraft operations appeared in Ref. 7.27. Hoh introduced the concept of the OVC scale in the form of Fig. 7.27, to establish the quality of task cues for the
|
|
|
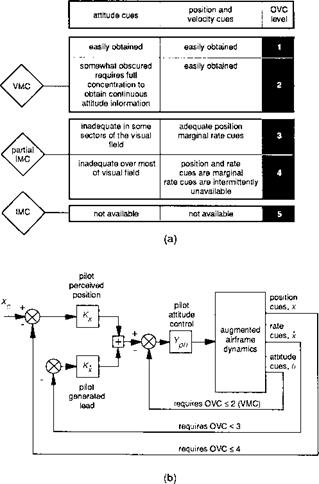
Fig. 7.27 The outside visual cue scale (Ref. 7.27): (a) quantification of outside visual cues (OVC); (b) required outside visual cues for control |
control of attitude and velocity or translational rate. In a flight test study to define the relative importance of such attributes as texture and field of view, Hoh developed the OVC concept and gathered pilot ratings for visual cues – the so-called VCRs (Ref.
7.28) . A conclusion of this study was that the stabilization function can be performed well with only a narrow field of view but fine-grain texture is vital, and also that the guidance function, and more general situation awareness, requires a wide field of view with macro texture. The OVC scale was further developed into the UCE (Refs 7.28,
7.29) to measure the usefulness and quality of artificial vision aids. The UCE scale along with the adjectival meanings of the different subjective VCRs are shown in Fig. 7.28. Pilots must rate the visual cues based on their ability to perform various low – speed/hover MTEs (with the DVE, rather than day, task performance requirements). The method for deriving the UCE is described in Refs 7.29 and 7.30. VCRs from at least three test pilots must be used to derive the UCE. Once derived for a given task,
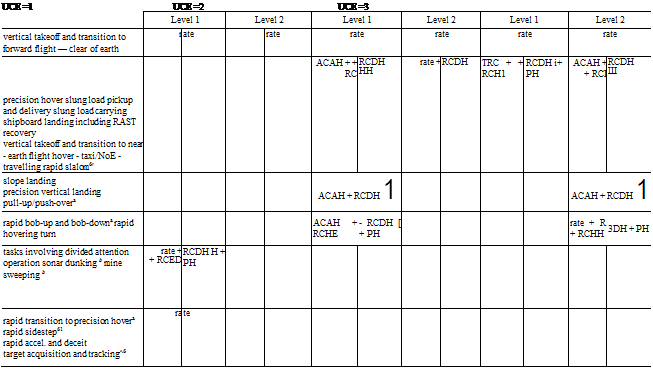
significant stability or guidance augmentation functions are added. This is to ensure that the VCRs are not corrupted by an aircraft’s poor handling qualities. The UCE innovation is used in ADS-33 to identify the requirement for enhanced stability augmentation and/or display augmentation. The requirement is summarized in Table 7.4, illustrating the response types needed to confer Level 1 flying qualities in different UCEs. Thus, if an aircraft with its vision aids is required to operate in a UCE 3 then only the full augmentation provided by translational rate command/position hold (TRCPH) will confer Level 1. Alternatively, if the vision aids could be enhanced to improve the UCE from 3 to 2, then attitude command/attitude hold (ACAH) will be sufficient. If a UCE 3 could be upgraded to 1, through the provision of high-quality world scene cues inside the cockpit, then the lowest level of augmentation provided by rate command (RC) will be sufficient. We can now see the trade-off between vision, or guidance, aids and control, or stability, augmentation, and with both technologies advancing rapidly in the 1990s it is likely that a wide variety of options will be available on future types depending on the character of the tasks. For example, recovering civil or military helicopters to small ships in poor visibility will certainly require both improved guidance and stabilization aids if the operational risks are to be significantly reduced.
The basic substantiating data for the requirements of Table 7.4 came originally from flight test data on the Canadian Bell 205 in-flight simulator (Ref. 7.31). Tests were conducted with varying levels of stability augmentation while the pilot flew with night vision goggles, fogged to vary the UCE. Later, a more systematic piloted simulation investigation was performed on the NASA vertical motion simulator (VMS), designed specifically to explore the need for enhanced stability augmentation in DVE (Ref.
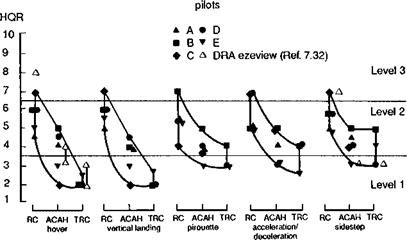
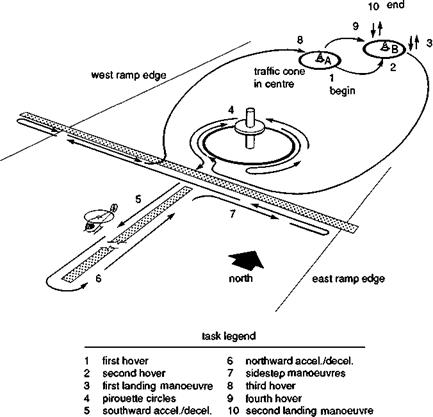
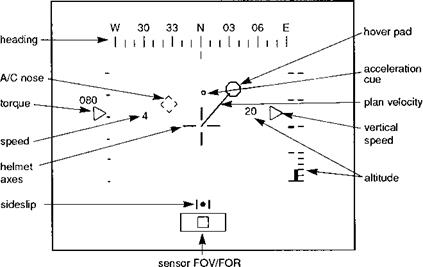
7.30) . In Fig. 7.29, taken from Ref. 7.30, HQRs are shown plotted against response type for five low-speed MTEs flown in the sequence – hover, hover, vertical landing, pirouette, 2 accel/decels, sidesteps, hover, hover and landing – as shown in Fig. 7.30. The CGI visual scene was degraded to UCE 3 by fogging the far field and reducing the micro- and macrotexture in the near – to mid-field. The HQRs illustrate clearly how the workload reduces as the augmentation is increased, poor Level 2 ratings characterizing the RC response type in all MTEs. Level 1 ratings were given for the TRC in most of the MTEs, with the ACAH system generally lying in the good Level 2 region. The results were obtained without any visual display augmentation. In a series of similar, more recent, trials using the advanced flight simulator at the DRA, pilots viewed the UCE 3 world scene through a monochrome, bi-ocular HMD (Ref. 7.32) shown previously in Fig. 2.49. The outside world scene, with an allround field of regard, but only a 48 x 36° field of view, was overlaid with different symbology sets to aid the pilots’ stabilization and guidance tasks. HQR data for two DVE tasks from ADS-33, the recovery to hover and sidestep, are superimposed on the results in Fig. 7.29 for comparison. In the AFS trials, the UCE 3 was obtained with a combination of a sparse outside world scene and superimposed symbology; strictly speaking, the data cannot be directly compared with the VMS data, where the pilots flew with the outside world scene alone. Nevertheless, the data correlate very well and confirm the marked change in performance and workload with level of stability augmentation. One of the symbology sets evaluated in Ref. 7.32 is illustrated in Fig. 7.31 and is based on the horizontal situation display featured in the current generation AH-64A helicopter. We shall discuss this type of format in more detail later in this section. Results from the AFS trial have highlighted the importance of the height hold facility to ensure Level 1 ratings with the ACAH and TRC response types. Another result of the AFS trial questioned
ahigh levels of aggressiveness may not be achieveable for
 UCE = 2 and 3.
UCE = 2 and 3.
^these tasks are normally accomplished in an environment where visual cueing may be consistent with UCE = 2 or 3 even in ‘day VFR conditions’.
^increase in rank toTRC not recommended for pitch pointing tasks.
|
Fig. 7.29 HQRs for different response types flying various MTEs (Ref. 7.30) |
|
|
|
Fig. 7.31 Low-speed display symbology format used in the AH-64A Apache (Ref. 7.26) |
the value of attitude bars on displays during very-low-speed MTEs, particularly when attitude stabilization is provided artificially, as in the ACAH and TRC response types. The bars did not provide significant improvements with the RC response type. Also, the dynamic cues provided by the moving bars could be distracting while not fulfilling a useful function. This introduction to the use of symbology to supplement the OVC brings us to the final topic of this section.