Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




In order to make the helicopter a viable operational aircraft, shortcomings in stability and control characteristics generally have to be made good by use of automatic flight control systems. The complexity of such systems, providing stability augmentation, long-term datum-holding autopilot functions, automatically executed manoeuvres and so on, depends upon the mission task, the failure survivability requirements and of course the characteristics of the basic helicopter.
Autostabilization is the response to what is perhaps the commonest situation, that in which inadequate basic stability is combined with ample control power. The helicopter is basically flyable but in the absence of automatic aids, continuous correction by the pilot would be
|
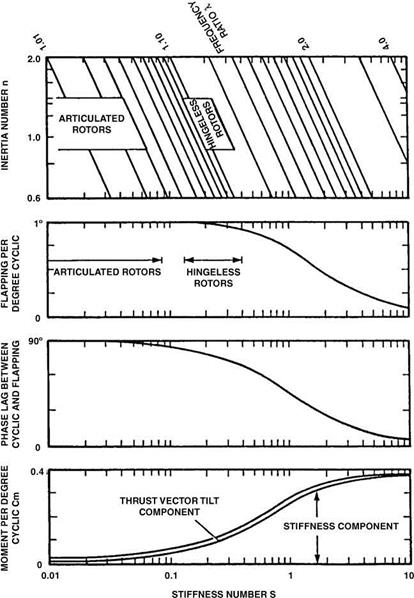
Figure 8.7 Rotor characteristics in terms of stiffness number |
required – a tiring process and in some conditions (such as flying on instruments) potentially dangerous. The corrective is to utilize some of the available control power to generate moments proportional to a given motion variable and thereby correct the motion. An automatic signal is superimposed on the pilot’s manual input, without directly affecting it. No signal feeds back to the controls; the pilot merely experiences the changed flying character.
Autostabilizing systems have in the past used mechanical devices integral to the rotor; typical of these are the Bell stabilizer bar and the Lockheed control gyro (see Figure 1.30).
Alternatively, devices may be electromechanical, operating on attitude or rate signals from helicopter motion sensors. Electrical or electronic systems are the more flexible and multipurpose. An example is the attitude hold system, which returns the helicopter always to the attitude commanded, even in disturbing environments such as gusty air. Naturally, the more the stability is augmented in this way, the greater the attention that has to be paid to augmenting the control power remaining to the pilot. The balance is often achieved by giving the pilot direct control over the attitude datum commanded. The design of a particular system is governed by the degree of augmentation desired and the total control power available.
The subject of helicopter stability and handling qualities is a very involved one and this chapter can only provide an entry point for the reader. For further information the reader is encouraged to consult dedicated texts on this subject such as Padfield as listed in Chapter 1.
References
1. Hohenemser, K. (1939) Dynamic stability of a helicopter with hinged rotor blades, NACATech. Memo. 907.
2. Sissingh, G. J. (1946) Contributions to the dynamic stability of rotary wing aircraft with articulated blades, Air Materiel Command Trans. F-TS-690-RE.