Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




It should be obvious to the reader that NoE flight in the DVE makes considerable demands on the piloting task. The pilot needs support with both the stabilization and the guidance functions that he or she performs, and developments in display and control technologies have been so rapid during the late 1980s and early 1990s that flying qualities requirements for their effective use have been slow to catch up. Even as the chapters of this book are laid down the subject is expanding in several directions embracing and mixing the traditional flying qualities and human factors disciplines. It is therefore not appropriate to be definitive at this stage and as one of the contributors at a TTCP workshop on the subject (Ref. 7.33) remarked, ‘the more we know about the subject the less we seem to understand’. This old adage seems particularly germane to the present topic and is enhanced by the apparent notion that every pilot would prefer to design the display in his own image. Stepping back from the detail we can review the different kinds of information required by the crew during a DVE mission, and which are candidates for superposition on an outside world scene:
(1) primary flight path information for guidance and stabilization, including speed, height, attitude, heading, etc;
(2) guidance information related to special tasks, e. g., recovery to ship, pathway in the sky for flying NoE, target acquisition and weapon aiming;
(3) flight envelope and carefree handling cueing;
(4) aircraft system status, e. g., engine torque, AFCS modes;
(5) situational (tactical) awareness data, e. g., navigation – Where am I?, hazards – Where are the obstacles or the threats?
Any attempt to cram all the above information on to one display will quickly lead to crew overload. One of the basic messages in display design is to provide information only as and when it fulfils a useful function, hence increasing situational awareness or task performance. Unfortunately, the achievement of maximum situational awareness seems at times to be at odds with achieving a specific task performance. Put another way, well-designed displays can help to recover the full OFE, previously reduced for flight in the DVE, but only at the expense of high pilot workload caused by poor fields of view, poor resolution and the increased potential for spatial disorientation. There are times when the crew need to gaze down a narrow field-of-view ‘soda straw’ and see fine detail with precision symbology, and others when they need to scan continuously a 220° field-of-view scene overlaid with guidance symbology cues. Each makes different demands on the display technology but, ultimately, field of view and symbology content, like many display attributes, need provide only the functionality required for a given task.
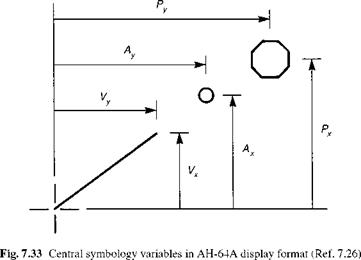
A good example of how symbology can be designed to aid specific tasks is provided by the AH-64A format shown previously in Fig. 7.31, in the so-called hover ‘pad capture’ or ‘bob-up’ mode. We supplement Fig. 7.31 with Figs 7.32 and 7.33, taken from Ref. 7.26, showing how the pilot uses this particular display to position the aircraft in the very-low-speed regime. The display is intended to aid the pilot maintain an accurate hover in a DVE. By ‘flying’ the acceleration cue into the hover pad and ‘flying’ both the cue and pad to the fixed aircraft reticle, the pilot is able to achieve a hover at a prescribed location, defined by the hover pad. Other flight data on the display include the heading, height and rate of climb and airspeed. The velocity vector indicates the aircraft’s horizontal inertial velocity. The box in the lower portion of the display shows the pilot where the FLIR image on the monocular display is positioned in the field of regard of the FLIR sensor. The three plan features that dominate the pilot’s attention during the pad capture MTE are shown in Fig. 7.33 and consist of the velocity vector, the acceleration cue and the hover pad. The 8-ft hover pad is driven on the display relative to the fixed reticle. The velocity vector has a full scale deflection of 12 ft/s, hence the display is intended to support very-low-speed manoeuvring to recover to the hover over a pilot-selected plan position. This display format provides
|
|
|
|
|
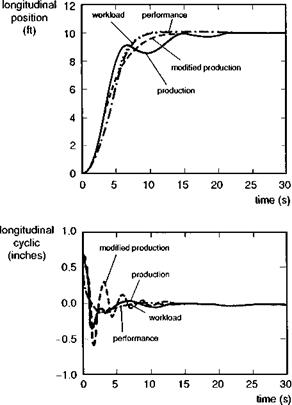
Fig. 7.34 Comparison of control inputs and aircraft responses for various display dynamics (Ref. 7.26) |
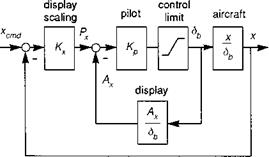
insight into how display dynamics can play a critical role in the overall achievement of task performance. Display dynamics are represented by the Ax /8b (translational acceleration to stick) transfer function in Fig. 7.32, defining the dynamic relationship between the acceleration cue (Ax) and the pilot cyclic stick (8b). As pointed out in Ref. 7.26, a pure gain display law would be the easiest to control but would be likely to lead to poor hover performance. At the other extreme, driving the acceleration cue with the trajectory demand would enable an improved task performance but would certainly require the pilot to work a lot harder. In the production version of the Apache display laws, a compromise is struck with a blend of the two. Reference 7.26 discusses three alternative drive law designs, designated the modified-production, performance and workload designs, that appear to offer significant improvements over the production version, principally by tailoring the response characteristics at frequencies above 2 rad/s, where the pilot will be working to make small and precise position corrections. Figure 7.34 shows the time responses of the aircraft horizontal position and longitudinal cyclic derived from an analytic simulation of Fig. 7.32. The theoretical predictions of improved performance and reduced workload are apparent. The results of an extensive piloted simulation exercise are also reported in Ref. 7.26, where ten pilots evaluated the different designs and concluded that the performance and workload designs were far superior. Figure 7.35 shows the HQRs for the different designs, indicating an improvement from poor to good Level 2 ratings for the pad capture task, with very high statistical significance.
The design of the display laws are clearly dependent on the response characteristics of the aircraft, as indicated conceptually in Fig. 7.32. For example, in the simulation trials conducted at DRA and reported in Ref. 7.32, the Ames display law
|
|
design methodology (Ref. 7.26), using the performance variant, was applied to derive laws that were compatible with the three response types evaluated, RC, ACAH and TRC. The general principle is to tailor the acceleration cue response to aircraft position x, attitude 9 and cyclic S, through transfer functions given by the general form
Ax x 9
-r(s) = fx(s)—(s) + f9 (s)-(s) + fSb (s) (7.8)
by matching to desired response and cancelling unwanted vehicle dynamics from the cue motion. The principles for achieving different design goals are described in Ref. 7.26. As with control law design for tailoring the aircraft response characteristics, display law design can be partially completed off-line using linear control techniques, but the final optimization still requires piloted evaluation. This example highlights some of the important integration aspects between displays that support pilotage and the response characteristics of the aircraft, hence any automatic guidance and control augmentation. Several other examples of emerging display formats for supplementing OVCs are discussed in Ref. 7.33 and indicate the potential of things to come, but are perhaps only stepping stones towards the tenuous aviation concepts of virtual reality and the computerized Pilot’s Associate that performs all the mechanical aviation functions, including pilotage, leaving the mission manager to direct the operation.
Flight in the DVE and agility represent the extremes of operation and obviously have a significant, although not exclusive, military relevance. Our third topic, carefree handling, is applicable to both civil and military operations, although once again the leading edge research has been forged by military requirements.