Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




Just like the sparrow hawk, a pilot flying a helicopter close to the surface and near obstacles requires clear visual information for attitude stabilization and flight path guidance, tasks not too dissimilar to cycling or walking over uneven or rough terrain. Although critical for short-term stabilization, vestibular motion cues are generally unreliable for guidance; turn the lights off or shut the eyes, and the cyclist or walker would soon fall over. Attitude stabilization cues for helicopter flight are derived from knowledge of the horizon, an awareness of spatial orientation and rotational motion. The requirements of ADS-33 are quite clear about the importance of stability augmentation when the usable cue environment (UCE) degrades below 1. Figure 8.1 summarizes the material presented in Chapter 7 – increased attitude stabilization (attitude command) as the
|
||||||||||
|
|
|||||||||
|
||||||||||
|
||||||||||
|
||||||||||
|
||||||||||
|
||||||||||
|
||||||||||
![]()
UCE degrades to 2 and increased velocity stabilization (translational rate command) as the UCE degrades to 3.
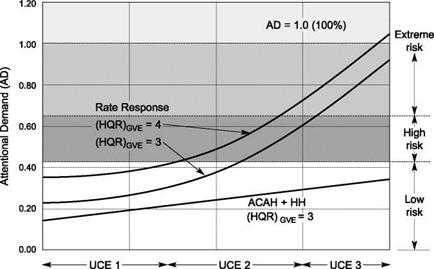
In Ref. 8.10, Hoh applied the UCE/VCR approach to quantifying the risk of spatial disorientation when flying in the DVE, using the original ADS-33 flight test database. The work reported addresses the wide class of ground/obstacle collisions that occur when aircrew are unaware that they have an inaccurate perception of their position, altitude or their motion. Hoh’s analysis models situations where the overall pilot workload is a combination of the attentional demands (AD) of flight control and the effort required to maintain situation awareness (SA). The greater the requirements for control attention, the less capacity remains for SA and Hoh hypothesizes a relationship. To quote from Ref. 8.10
The risk of a spatial disorientation accident is linked to the attentional demand requiredfor control as follows. High risk is defined when attentional demand exceeds 42% of the total available workload capacity. Extreme risk is defined when the AD exceeds 66% of the available workload capacity. The attentional demand for rotorcraft control in the DVE depends on two factors, 1) the basic handling qualities in the GVE and 2) the Response Type (Rate orACAH + HH). The relationship between these factors is summarised in Fig. 8 where the attitude VCR and translational VCR are assumed to be equal to simplify the presentation of the effects. These results indicate that as the visual environment is degraded: 1) the use ofACAH+HH is highly effective in minimising the increase in AD, and 2) helicopters with a rate response type (conventional) suffer a rapid increase in AD. Any factor that degrades the HQR in the GVE (e. g. marginal basic handling qualities or turbulence) exacerbates the second result.
The presentation in Fig. 8.2 is compelling but also conceptual, since it is acknowledged that the relationships between handling qualities, control workload and UCE proposed
|
Fig. 8.2 Summary of the effect of the DVE on attentional demand (from Ref. 8.10) |
are approximate and have not been fully quantified or validated. Nevertheless, they represent an intuitive and compelling argument for the importance of providing the pilot with augmented attitude control in the DVE. Moreover, Hoh concludes that providing additional instruments or displayed information to ‘cue’ the pilot can actually increase, rather than decrease, the AD, further increasing the risk of disorientation.
With this line of thinking, research into improving the UCE becomes focused on improving spatial awareness for the pilot. This research needs to establish relationships between the pilot’s VCRs, features in the visual scene and the pilot’s control strategy. The two components of a pilot’s VCR can be thought of the adequacy of cues for flight guidance (translational rate) on the one hand, and the adequacy of cues for flight stabilization (attitude) on the other, i. e., the two dimensions of spatial awareness. While the previous discussions in this book on flying qualities have centred on the vehicle and the associated response characteristics, when addressing spatial awareness, we have to face the most adaptable and least well-understood element of the system and, indeed, the whole flying qualities discipline – the pilot and his or her perception system. To understand more about what makes up the UCE/VCR, we need to develop an engineer’s appreciation of how the pilot organizes visual information and the human factors of flight control. Improved understanding here can lead to the development of more efficient pilot aids that function harmoniously with the natural systems, and are hence more effective at helping pilots maintain spatial awareness. Unlike the aircraft motion however, pilot action is not simply governed by Newton’s laws and the rules of continuum mechanics; the perception-action system is far from completely understood and behaviour is often confused by misjudgements and malfunctions that are difficult to describe, let alone model. The following sections should be read in the light of this uncertainty.