
Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




In the production of this second edition, research results derived from the University of Liverpool’s motion simulator, HELIFLIGHT, and its simulation environment, FLIGHTLAB, have been used extensively. This appendix provides an overview of the facility; the material is derived largely from Ref. 8A.1.
The HELIFLIGHT facility can be described as a reconfigurable flight simulator, with six key components that are combined to produce a relatively high-fidelity system, including
(a) interchangeable flight dynamics modelling software (FLIGHTLAB), featuring ‘selective fidelity’, e. g., different types of rotor wake model, with a real-time interface, PilotStation;
(b) 6-DoF motion platform;
(c) four-axis dynamic control loading;
(d) three-channel collimated visual display system (135 x 40°) plus two flat panel chin windows (60°), each channel running its own visual database;
(e) reconfigurable, computer-generated instrument display panel and heads-up-display (HUD)
(f) data record and time history capture facility.
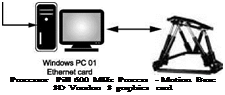
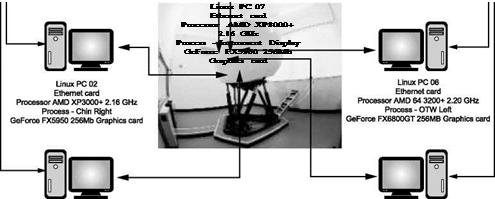
A schematic of the HELIFLIGHT configuration is shown in Fig. 8A.1.
The main host computer is a dual processor PC running Linux. One processor runs FLIGHTLAB and PilotStation, whilst the second processor drives the control loaders. In addition, this machine acts as both a file server and a server for other hosts. The use of two Ethernet cards (one to access the Internet and the other to access the HELIFLIGHT network via a hub) enables isolation of the local area network from the
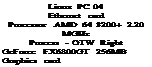
Linux PC 05 Ethernet card
 |


 |
 |
Processor AMD 64 3200+ 2.20 GHz Process – OTW Centre GeForce FX6800GT 256MB Graphics card
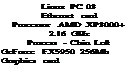
Fig. 8A.1 Schematic of the HELIFLIGHT configuration
Internet, maximizing throughput and security. There are seven other Windows-based host computers running the motion base, the two chin windows, the three forward Out the Window (OTW) displays and the instrument display. The HUD on the OTW centre can be toggled on/off. All the Windows computers are equipped with graphics cards that send signals to the cockpit displays, asynchronously. The keyboard and mouse of each computer are also multiplexed, allowing each Windows computer to be controlled from a single station.
The simulation laboratory has two main areas: the simulator control room and the cockpit pod room. An authorized simulator operator controls the real-time operation of the simulator from the main host running PilotStation in the control room and interacts with the pilot in the cockpit room using a two-way communication system. From this viewpoint, the operator can observe both the motion of the cockpit and also the displays which are replicas of those present in the cockpit pod (Fig. 8A.2).
During a real-time session or ‘sortie’, the operator is responsible for ensuring the safe operation of the motion base and can override a pilot’s inputs in the event of loss of pilot control. A lap belt is worn by the pilot during a sortie and is part of the safety interlock system that incorporates electromagnetic door releases on the gull wing capsule door and a cockpit room door interlock. Emergency stop buttons are available to both the pilot and the operator. In the case of an emergency or power failure, the simulator parks, returning the capsule safely to its down position and the cockpit pod door opens.
Throughout a sortie, a video/DVD record is taken of OTW centre, generating both a visual and audio log of the mission for use in post-trial analysis. PilotStation also has a data-logging function, allowing a range of aircraft performance parameters, flight model outputs and pilot control inputs to be captured for subsequent processing. Using a computer image of the aircraft being flown, flights can later be reconstructed from any viewing point.
