Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




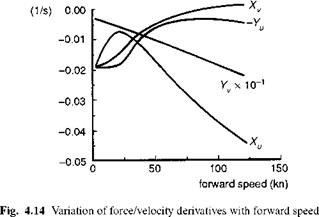
The four derivatives Xu, Yv, Xv and Yu are closely associated with each other at low speed. They are shown as a function of speed for the Lynx in straight and level flight in Fig. 4.14. In high-speed flight the coupling derivatives are fairly insignificant and the direct force dampings Xu and Yv are practically linear with speed and reflect the drag and sideforce on the rotor-fuselage combination respectively. At hover and at low speed, all four derivatives are the same order of magnitude. The direct derivatives are principally due to the disc tilts to aft and port following perturbations in u and v
(see eqn 4.53). The coupling derivatives are less obvious, and we have to look into the theory of non-uniform inflow, described in Chapter 3, for an explanation to the surprisingly large values of Xv and Yu extending to about 40 knots forward flight. At the hover condition, a perturbation in forward velocity u leads to a strong variation in wake angle x (eqn 3.145) and hence non-uniform inflow A. xc. An approximation to the increase in inflow at the rear of the disc can be derived from eqn 3.144:
![]() SOxc ^ 1 dp, 2
SOxc ^ 1 dp, 2
For every 1 m/s increase in forward velocity, the downwash increases by 0.5 m/s at the rear of the disc. The linear variation of inflow along the blade radius results in a uniform incidence change; hence the effect is identical to cyclic pitch in the hover. The direct rotor response to a longitudinal incidence distribution is therefore a lateral disc tilt j1s. The derivative of lateral flapping with inflow can be derived from eqn 3.71, as
![]()
 |
эв1* _________ L_ S = 8 (хв-0
3^1c 1 + Sj ’ p Y
where the Stiffness number is given in terms of the flap frequency ratio and Lock number.
The Stiffness number ranges up to values of about 0.3 for current helicopters; hence the lateral flapping derivative in eqn 4.58 is close to unity and a perturbation of 1 m/s in forward velocity leads to about 0.2°-0.3° lateral disc tilt to starboard, depending on the rotorspeed. Similar arguments can be made to explain the low speed variation of Xv and the same effect will be reflected in the moment derivatives Mv and L u. These variations in non-uniform inflow can be expected to impact the coupling of lateral and longitudinal motions at low speed. We shall return to this topic later when discussing the natural modes of motion.
![]()
|
|
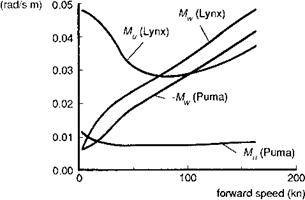
Fig. 4.15 Variation of longitudinal static stability derivatives with forward speed The derivatives Mu and Mw
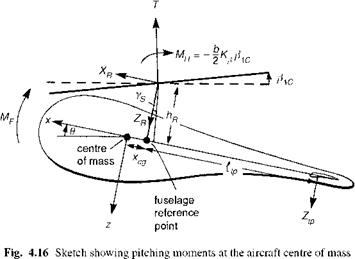
The derivatives Mu and Mw, the so-called speed and incidence static stability derivatives, have a major effect on longitudinal stability and hence handling qualities. For fixed-wing aircraft flying at low subsonic speeds, the speed stability derivative is practically zero – all the aerodynamic moments are proportional to dynamic pressure and the derivative works out to be proportional to the trim value of aerodynamic pitching moment, i. e., zero. With a helicopter, the main rotor moments due to speed changes are roughly constant across the speed range, but the aerodynamic loads on the fuselage and empennage are strong functions of forward velocity. In particular, the normal load on the horizontal stabilizer gives a strong pitching moment at the centre of mass and this component provides a contribution to Mu proportional to the trim load on the tail. Figure 4.15 compares the variation of the two static stability derivatives with speed for Lynx and Puma. The fourfold increase in magnitude of Mu for the Lynx relative to the Puma is a result of the much higher rotor moments generated by the hingeless rotor for the same velocity perturbation. Both aircraft exhibit static speed stability; an increase in forward speed causes the disc to flap back, together with an increase in the download on the tailplane, resulting in a nose-up pitching moment and a tendency to reduce speed. This positive (apparent) speed stability is important for good handling qualities in forward flight (see Chapter 6), but can degrade dynamic stability in both hover and forward flight (see the later section on stability of the natural modes). Comparing the incidence stability derivative Mw for the two aircraft, we can see similar orders of magnitude, but the Lynx exhibits instability while the Puma is stable. This derivative was discussed at some length in Chapter 2 (see Figs 2.25 and 2.26). In forward flight, a positive perturbation in normal velocity, w, causes a greater increase in lift on the advancing than on the retreating side of the disc. The disc flaps back giving rise to a positive, nose-up, destabilizing, pitching moment. This effect does not change in character between an articulated rotor (Puma) and a hingeless rotor (Lynx), but the magnitude is scaled by the hub stiffness. The pitching moments arise from three major sources – the main rotor, the tailplane and the fuselage (Fig. 4.16), written as shown in eqn 4.60.
|
|
In very approximate form, the rotor moment can be written as a combination of a moment proportional to the disc tilt and one proportional to the rotor thrust, i. e.,
M ~ — ^ — Kp + hRT^ Ac — (xcg + hRYs)T + (ltp + xcg)Ztp + Mf (4.61)
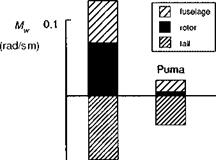
The pitching moments from the rotor, tailplane and fuselage are shown in Fig. 4.16. The contribution of the tail to Mw is always stabilizing – with a positive incidence change, the tail lift increases (Ztp reduces) resulting in a nose-down pitch moment. The importance of the horizontal tail to the derivative Mw and helicopter pitch stability is outlined in Ref. 4.7, where the sizing of the tail for the YUH-61A is discussed. The contribution from the fuselage is nearly always destabilizing; typically the aerodynamic centre of the fuselage is forward of the centre of mass. The overall contribution from the main rotor depends on the balance between the first two terms in eqn 4.61. We have already stated that the disc always flaps back with a positive (upward) perturbation in w, but the thrust also increases; hence the second term, due to the offset of the thrust from the centre of mass, is actually stabilizing for configurations with forward centre of mass and shaft tilt. This is the major effect for fixed-wing aircraft, where the distance between the centre of mass and the aerodynamic centre of the whole aircraft is referred to as the static margin. For small offset articulated rotors, with a centre of mass well forward of the shaft, the thrust offset effect can be as large as the hub moment term in eqn 4.61, resulting in a fairly small overall rotor moment. This is the case for the Puma, with our baseline configuration having a forward centre of mass location; also, the flap hinge offset is only 3.8% of the rotor radius. For hingeless rotors with aft centre of mass, both thrust offset and hub moment effects are destabilizing, with the hub moment due to flapping dominating. All three contributions to the incidence stability vary approximately linearly with speed above about 40 knots. Figure 4.17 illustrates the contributions from the different components to Mw at the 120-knot high-speed condition. The overall magnitude of all three components is greater for the Lynx, reflecting the much smaller pitch moment of inertia (which normalizes the derivative) for that aircraft compared with the Puma.
|