Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




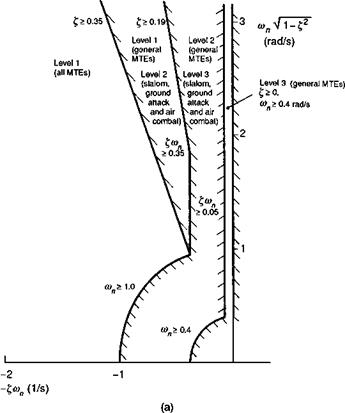
At high forward speed, helicopters typically suffer from the same, so-called, nuisance mode as fixed-wing aircraft – the Dutch roll, exacerbated by weak weathercock stability and strong dihedral effect. The theory for this coupled mode has been presented in Chapter 4. In response to a doublet pedal input, the aircraft motion will soon be dominated by a weakly damped oscillation, comprising strongly coupled yaw, roll, sideslip and, for helicopters, pitch motions. The two fundamental parameters are the natural frequency and damping, and it is not surprising that efforts to define handling qualities related to the stability characteristics of this mode should have been focused on the corresponding two-parameter chart, or classical frequency/damping plane. The quality boundaries defined in ADS-33 are derived largely from the considerable database for fixed-wing aircraft (Ref. 6.6), with slightly relaxed stability requirements. A comparison of military and civil requirements (for single pilot IFR) is shown in Figs 6.65(a) and (b). The variety of boundaries drawn in Fig. 6.65(a) once again reflects the mission orientation of the military requirements. The comparison between civil and military requirements highlights several aspects already met in previous criteria – chiefly the greater demands made on designers of military aircraft. Another noticeable difference is shown in the low-frequency damping requirements. Both are based on minimum total damping at zero frequency. The more stringent military Level 1/2 boundary is set at time to half amplitude of 0.69 s, while the civil boundary is set at time to double amplitude of 9 s. The evidence supporting the minimum rnn boundary for military
|
Fig. 6.65 Lateral/directional oscillatory requirements: (a) military (Ref. 6.5) |
|
|
helicopters in Fig. 6.65(a) is thought to be fairly limited; to the author’s knowledge, no supporting data for these boundaries relevant to helicopters have appeared in the open literature since the publication of ADS-33. It is interesting to note that the criterion for the stability of long-period pitch and roll modes (frequencies less than 1 rad/s) lies within the rnn >1.0 contour (see Fig. 6.45). One aspect raised here is the importance to handling qualities of the separation of frequencies between the modes with low stability. Modes with overlapping frequencies can cause additional pilot workload, especially when strong cross-couplings are present.
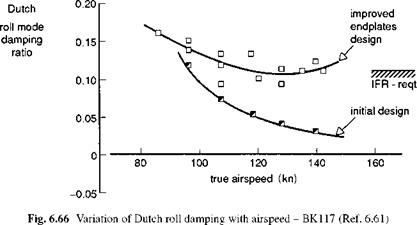
The reader is referred to the analysis of Dutch roll stability and response in Chapters 4 and 5 where the results of the AGARD WG18 study on Dutch roll stability are discussed (Ref. 6.79). Most military and civil helicopters have autostabilization in the yaw axis to improve the Dutch roll damping and, generally, augmented rate damping is sufficient to achieve Level 1. In some cases, design efforts are successful in improving the natural aerodynamic stability in yaw. Reference 6.63, for example, describes how modifications to the fin of the SA332 Super Puma significantly improved the Dutch roll characteristics of this aircraft compared with the original Puma. Figure 6.66, taken from Ref. 6.61, illustrates the marked improvement in Dutch roll damping through the fitting of end-plates on the BK117 helicopter; the new design met the FAA requirement without autostabilization.
|
|
Two final points need to be made about the lateral/directional oscillatory mode. First, at high speed, the frequencies are encroaching on the range appropriate to small amplitude tracking, and the requirements on damping should be seen as supplementing the bandwidth criterion. Second, a very important handling characteristic associated with Dutch roll motion is the phase and relative amplitude between roll and yaw; separate criteria address these issues under the heading yaw-sideslip response to lateral cyclic, and we shall address these when discussing cross-coupling, in Section 6.7.