Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




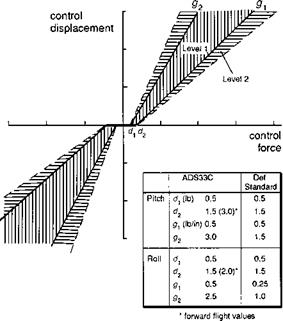
Evaluation of a helicopter’s flying qualities for a particular role will include an assessment of the mechanical characteristics of the pilot’s controls. No matter how good the response characteristics of the aircraft are, the overall flying qualities will be judged by the quality of the operation of the pilot’s controls reflected in a range of design features including cyclic self-centring, breakout forces and force gradients, deadbands and trimming actuators. Breakout forces that are too high, for example, can inhibit the pilot from making small, precise changes in flight path, and sluggish hydraulic systems can impede manoeuvrability. Slow trim motors can increase pilot workload and control force gradients that are too light or too strong can spoil the use of smooth control action by the pilot. Nowadays there should be little controversy about what constitutes good controller characteristics when discussing central cyclic control sticks with large displacement; most medium to large helicopters have featured such devices with fixed-stiffness centring springs and operating through hydraulic actuation systems, for several decades. The range of acceptable characteristics needs to be fairly broad as the control forces generally have to be harmonized with the response characteristics. Figure 7.41 illustrates the general form of the control force/displacement relationship showing maximum and minimum values for the breakout force levels and gradients. The accompanying table gives values for Level 1 qualities as defined by ADS-33 (Ref. 7.1) and Def Stan 00970 (Ref. 7.37). Notable differences are in the roll force gradients and the maximum tolerable breakout forces, which appear to reflect traditional preferences in the different countries’ armed services. Unlike fixed-wing aircraft, helicopters
|
Fig. 7.41 Control force versus control displacement for centre-sticks (Refs 7.1, 7.37) |
do not usually include any artificial feel augmentation to cue the pilot in manoeuvres. However, a new requirement in ADS-33 for achieving Level 1 handling is for the stick force per g to lie between 3 lb (13 N) and 15 lb (67 N) per g (Ref. 7.1).
All current operational helicopters are fitted with a conventional cyclic centre – stick, collective lever and pedals, with a wide variety of different mechanical characteristics, reflecting the varying design preferences and, ultimately, pilot adaptability. Future helicopters with fly-by-wire control systems are likely to feature integrated side – stick controllers, and during the period between the late 1970s and late 1980s much of the basic research was undertaken to explore the potential of such devices (Refs 7.387.41). A key initial concern was whether equivalent handling qualities and performance could be achieved with sidesticks, considering the high levels of cross-coupling in helicopters. Other issues related to the required level of stability and control augmentation to enable satisfactory performance with sidesticks, the trim mechanisms, grip designs and force-feel characteristics. The review paper of in-flight simulation activities at the Canadian Flight Research Laboratory (FRL), Ref. 7.41, offers the most comprehensive and coherent insight into what is currently known about passive sidesticks for helicopters and forms the basic material for this short discussion. Sidestick control is now generally recognized as being a step in the right direction for helicopters and entirely commensurate with the development of fly-by-wire control. Significant improvements in cockpit ergonomics, including a dramatic influence on seating posture, relieving pilot fatigue and lower spinal damage, coupled with the potential for greater precision through integrated hand movements, are powerful reasons for their application.
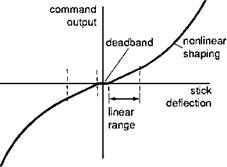
One of the first issues to be encountered with helicopter sidesticks was concerned with the need for command shaping to tailor the control sensitivity. Basically, to provide
|
Fig. 7.42 Typical nonlinear shaping function for sidestick controllers |
the same levels of control power as with conventional controllers, the stick to response gearing would need to be nonlinear with a steepening gradient (Fig. 7.42). Linear gearing results in the control sensitivity being too high for small amplitude control inputs, giving rise to a strong tendency to overcontrol. A major question regarding the use of sidesticks has been how many control functions should be included in a single inceptor – 2, 3 or 4. Another question is related to whether there is a strong preference for displacement or force sensing. These two issues are not unrelated. Reference 7.41 reports pilot preference for a separate collective with a displacement sidestick, compared with no preference between 4 + 0 and 3 + 1 (collective) with a force sensing stick. The Canadian studies have demonstrated that four-axis control is entirely feasible for low-moderate gain tasks. For higher levels of aggression and higher bandwidth helicopters than the FRL Bell 205, little flight data have been published in the open literature, but it is suspected that 3 + 1 (collective) will be the extent of the integration. The Canadian research confidently proclaims that, to quote from Ref. 7.41:
The studies.. .consistently suggest that there is no evidence that the use of integrated side-mounted controllers in a helicopter.. .is detrimental to the overall handling qualities ofthe vehicle, nor that they demand ofthe pilot any unusual or exceptional skills in their use. Neither handling qualities nor pilot performance should control decisions as to the use of integrated sidesticks in helicopters.
For any specific application, however, there is an insufficient database to draw firm guidelines on the many design issues involved – the optimum force characteristics, grip shape and orientation, etc. ADS-33 reserves the section on sidesticks for future requirements. Two future projects are already committed to sidesticks. In Ref. 7.42, the design for the RAH-66 sidestick is referred to in passing as a three-axis (roll, pitch and yaw) sidestick with limited vertical axis capability, used in conjunction with the altitude hold function. In Ref. 7.43, the design of the NH-90 is shown to include a more conservative two-axis sidestick. Both will be passive, in the sense that the force characteristics will be fixed. New research into active sidesticks is underway at the time of writing. These should enable tactile cueing and more general, variable force – feel characteristics, tailored to the changing response types in an actively controlled helicopter.