
Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




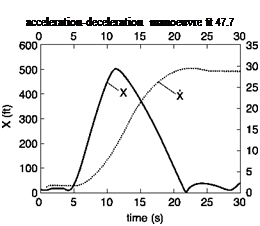 |
Figure 8.15 shows a schematic of an acceleration-deceleration manoeuvre, showing the distance to go to stop at x = 0. Figure 8.16 shows the kinematic profile of a helicopter
Fig. 8.16 Kinematics of the acceleration-deceleration manoeuvre
time (s)
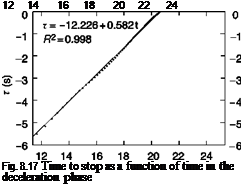 |
flying a 500 ft accel-decel in a flight simulator trial, and Fig. 8.17 shows the variation of time to stop, Tx, during the deceleration phase of the manoeuvre. The data are taken from Ref. 8.31, where the author and his colleagues introduced the concept of т – control in helicopter flight, also described as prospective control in recognition of the temporal nature of flight control. The deceleration is seen to extend from about 11 s into the manoeuvre, when the peak velocity is about 30 knots, for about 10 s, when the time to stop is nearly 6 s.
Figure 8.17 shows that the correlation of тх with time is very strong, with a correlation coefficient R2 of 0.998. The slope of the fit, i. e., T, is 0.58, indicating a non-constant deceleration with peak during the second half of the manoeuvre. So the pilot initiates the deceleration when the time to stop is about 6 s and holds an approximately constant T strategy through to the stop.

As referred to above, the use of т in motion control has been the subject of research in the natural world for some time. In Ref. 8.32, Lee and colleagues have measured the т control strategy of pigeons approaching a perch to land. Figure 8.18 shows a sequence of stills taken during the final 0.5 s of the manoeuvre. The analysis of the photographic data shows that the pigeon controls braking in the last few moments of flight by maintaining a constant T for the gap between its feet and the perch, as shown in Fig. 8.19. The т of the pigeon’s feet to the landing position is given by т(Xfeet, Ip). The feet are moving forward and the head is moving back, so the visual ‘cues’ are far from simple. The average slope of the lines in Fig. 8.19 (т) is about 0.8, indicating that
|
Fig. 8.19 Time to land for pigeon approaching a perch (Ref. 8.32) |
the maximum braking occurs very late in the manoeuvre – the pigeon almost crash lands, or at least experiences a hard touchdown, which ensures positive contact and is probably quite deliberate.
So how does a pilot or a pigeon manage to maintain a constant T, or indeed any other t variation, as they approach a goal? In addressing this question for action in the natural world, Lee gives a new interpretation to the whole process of motion control, which has significant implications for helicopter flight control and the design of augmentation systems. We now turn to the general theory of t-coupling, which also addresses the need for controlling several motion t ’s in more complex manoeuvres and introduces the concept of the motion guide and its associated t.

