Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




In December 1941 Igor Sikorsky flew his VS 300 helicopter design – see Figure 1.7 to a world endurance record of over 1 hour. It was fitted with collective and cyclic pitch on the main rotor and had a system of rotors at the tail. The torque reaction was provided by a vertical tail rotor and a horizontally aligned second rotor provided adjustment in pitch. In January 1942 an improved VS 300 flew for the first time. Designated the XR4 it was the forerunner of the R4 which was the first production helicopter outside of Germany. It was also the only
|
|
|
Figure 1.7 Vought Sikorsky VS300 |
helicopter operated by the USA during the Second World War and became known as the Hoverfly in the UK.
In 1943 the Doblhoff WNF 342 emerged. It used tip-jet drive with fuel being pumped from tanks in the fuselage along hollow rotor blades and burnt at the tips.
In October 1943 the R4 (designated HNX-1) became the first helicopter to be accepted by the US Navy.
In 1944 the Flettner rotor appeared on the Kolibri FL282 and the German Ministry of Defence placed an order for 1000 aircraft. This type of twin rotor is seen today in the Kaman Huskie and KMax helicopters and consists of two identical rotors, rotating in opposite senses. They have rotor shafts placed close together – laterally – and inclined outwards enabling the rotors to turn without any blade clashing.
January 1944 recorded the first mercy mission when a R4 US Coast Guard helicopter flew blood plasma to aid 100 crew members injured in an explosion on a US Navy destroyer.
September 1945 saw the first helicopter flight across the English Channel when a German Crew flew a Fa 223 Druck (Dragon) to Airborne Force Experimental Establishment. This was a large utility helicopter with two rotors placed on outriggers.
During the period of the Second World War, Sikorsky produced 600 airframes of their XR4, XR5 and XR6A variants before VJ Day on 2 September 1945.
In the First World War, Petroczy built a vertically lifting machine hoping to replace captive observation balloons, which were very vulnerable. The technical and experimental development was conducted by the illustrious Theodore von Karman. It consisted of two contrarotating rotors positioned within a framework which also contained three radial engines and the undercarriage was pressurized bags placed in the centre and at the end of three legs. An observation basket was placed above the rotors. Wilhelm Zurovec is often neglected in any description of this air vehicle except that the designation is PKZ (Petroczy Karman Zurovec).
In May 1918, thePKZ2 (see Figure 1.3), Hungary’s first military helicopter, flew tethered to a height of 50 m with new 31 hp Le Rhone engines.
1.1.2 Inter-war Years
In 1921 George de Bothezat directed the first US Army programme into helicopters. After working in secrecy at Dayton, the de Bothezat helicopter (see Figure 1.4), made its first flight in December 1922.
|
|
|
Figure 1.4 The de Bothezat Quadrotor |
The rotor layout was to have one rotor on each of four arms with the pilot positioned in the centre. Numerous flights were made in 1923 carrying up to four people. The US Army did not pursue the design but acknowledged its contribution to helicopter technology generally.
In the 1920s Emile Berliner developed a helicopter with the usual, at that time, layout of contrarotating rotors with vertical and horizontal vanes positioned under the rotor aiming, unsuccessfully, to give control. In 1922, the design moved into placing rotors on wing tips fitted to what was essentially a fixed-wing fuselage based on a Nieuport 23. Pitch control was achieved by a small propeller located just forward of the fin. The problems faced were those of not sufficient rotor size to generate sufficient thrust and blockage of the rotor downwash by the wing surfaces.
The French engineer Etienne Oehmichen began helicopter experiments by using balloons to assist the rotors in lifting the aircraft. In 1922, he was able to discard the balloon and use a four – rotor configuration. There were also five small, horizontal, variable pitch propellers to control the aircraft’s attitude in flight. Many flights were made lasting several minutes and in April 1923 the record distance of 358 m was achieved. In April 1924 Oehmichen raised the straight line distance record to 525 m only to have it broken the following day by the Spaniard, Marquis Pateras Pescara. In the following May he succeeded in flying a 1 km closed circuit course winning a 90000 franc prize from the Service Technique de L’Aeronautique.
Pescara flew for 736 m with a design of four biplane rotor blades on each of two rotors. These were placed on the same vertical axle and rotated in opposite directions. The pilot had control over the blade pitch and this helicopter was important in this respect as it heralded the use of autorotation for safe landing in the event of engine failure. Pescara attempted the closed course flight but was unsuccessful and it was left to Oehmichen to achieve this the following year.
In England Louis Brennan was developing his helicopter at the Royal Aircraft Establishment in Farnborough – see Figure 1.5. It was a two-bladed rotor powered by propellers fitted to the blade tips.
Thus external propulsion did not need torque reaction of a second rotor. Tethered flights inside a hangar were undertaken in 1924 with free flights beginning in 1925. They were halted in 1926 after an accident.
In 1925, the Dutch engineer Baumhauer developed a single two-bladed main rotor helicopter which had the beginnings of blade control via a swash plate system. It also had torque control provided by a separate vertical rotor, which was the forerunner of the modern day tail rotor. The flight of the helicopter was not altogether successful and chains were hung from the corners of the airframe to improve the stability. While ultimately unsuccessful, this design provided important technological pointers for the future.
The Hungarian engineer Oscar von Asboth developed a sequence of designs which comprised two contra-rotating main rotors and control was achieved using vanes placed in
|
Figure 1.5 Brennan helicopter |
the downwash. The fourth variant was the AH4 and in 1930 it climbed to a height of 31 m, flying a distance of 2800 m. Also in 1930 the Italian Corridon D’Ascanio broke three world records of altitude (59 feet) distance (1180 yards) and endurance (8 minutes, 45 seconds). The configuration consisted of two contra-rotating main rotors of two blades each. The blade pitch was controllable in flight by the pilot by means of trailing-edge-mounted tail elevators – a unique design feature at that time.
Also in the 1930s the Belgian Nicolas Florine was working on what is now termed the ‘tandem helicopter layout’. Both rotors spun in the same direction and the counteracting torque was provided by tilting the two rotor shafts appropriately.
Breguet now reappeared working with Rene Dorand. The Breguet-Dorand Gyroplane was so successful in its flight that many feel that it is the first real helicopter. It made its first flight in June 1935 after which flight tests and design amendments were made over the following months. December 1935 sawthis helicopter presented to the world and before the FAI itflewat 67 mph raising the world speed record further. In September 1936 it rose to a record 517 feet altitude and in November set the closed course record of 27.4 miles. The design had two twin – bladed rotors which were mounted on universal joints allowing the rotor discs to be used to control the helicopter flight. This is the beginning of the articulated rotor design.[2] Torque control was achieved by differential blade pitch on the two main rotors.
The final part of the early years of helicopter development is defined by the work of Henrich Focke in Germany. One year after the first flight of the Gyroplane, the Focke-Achgelis Fa61 flew for the first time. This used two three-bladed main rotors placed laterally on outriggers – the forerunner of the side-by-side configuration. It was very successful in breaking world records including 77 mph, 8000 feet altitude and an endurance of 1 h 20 min. It also flew a closed course of 50 miles. In February 1938, Hanna Reich flew this aircraft inside the Berlin Deutschlane Halle sports arena. It took off, hovered and flew sideways within the hall in front of many spectators. With the banked seating, recirculation was very apparent after a period of flight, with the consequence that much rubbish was seen flying through the air!
Alongside the development of the helicopter, the autogyro played a significant part in the evolution of its sibling. In January 1923 the Spaniard Juan de la Cierva achieved the first flight of an autogyro. The vehicle itself was developed from the airframe of a fixed-wing aircraft; the wings were shortened, a rotor was fitted above the centre of the fuselage and the empennage was retained virtually unmodified. It was designated the Cierva C-4. de la Cierva is one of the most respected rotorcraft pioneers and his work was very influential in the history of rotorcraft engineering. In September 1928 the first rotary-winged aircraft crossing of the English Channel took place when de la Cierva flew his C8L MkII, including a passenger from Croydon, to Le Bourguet. Figure 1.6 shows a later type – the C8V.
In the Soviet Union, the first tethered helicopter test took place in August 1930 with the Ts AGI1-EA.
In January 1939 a Kellett autogyro flew the first mail service for Eastern Airlines linking the main Post Office in Philadelphia, PA with Camden NJ Airport.
1.1 Looking Back
1.1.1 Early Years
The first foray into rotary-winged flight occurred around 400 bc with a toy known as the Chinese top. It was constructed with a central shaft to which was attached wings consisting of feathers or flat blades inclined to the rotation plane normal to the shaft. This was spun between the hands and by generating thrust flew for a short period of time. Jumping forwards to ad 1325, a Flemish manuscript contained the first known illustration of a helicopter rotor which was operated by the pulling of a string.
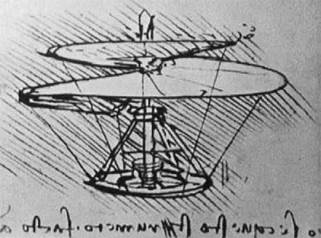
Just over 150 years later we encounter probably one of the most influential milestones in the work of Leonardo da Vinci. His famous design of a rotary-wing vehicle, see Figure 1.1, forms an ideal illustration of the origin of the term ‘helicopter’. It is commonly considered to be the combination of the words ‘helix’ and ‘pteron’ giving the concept of the ‘helical wing’.
In 1784, Launoy and Bienvenu built a mechanical model with two rotors. It was effectively the Chinese top but extended to a pair of rotors on the same axle but rotating in opposite directions. It was powered by a leaf spring and strings. It is similar to the coaxial configuration of more modern times.
In 1810, Sir George Cayley wrote an aeronautical paper preparing the ground for future helicopter development. He designed an air vehicle consisting of two pairs of contra-rotating rotors on either side of a canvas-covered central fuselage structure to generate lifting thrust. The rotor blades were inclined sectors with no noticeable aerofoil. Forward propulsion was provided by a pair of pusher propellers mounted at the rear. This design was the forerunner of many features of modern rotary-winged vehicles. The absence of a sufficiently powerful engine prevented the project from leaving the drawing board – let alone the ground.
The year 1878 saw Forlanini build a model powered by steam. It flew to a height of 40 feet for aperiod of20 seconds. Itwas impossible to achieve this by carrying a steam engine-because of the weight – so Forlanini devised a method whereby a sphere was positioned underneath the model and provided a storage vessel for the steam. This was then slowly tapped to obtain the required propulsive torque.
The lack of suitable power also hampered the work of Thomas Alva Edison. He initially conducted tests on rotors to examine the thrust v power performance. Finding this to be unfavourable he then focused on the engine and wrote of his attempts to use gun cotton in the
Basic Helicopter Aerodynamics, Third Edition. John Seddon and Simon Newman. © 2011 John Wiley & Sons, Ltd. Published 2011 by John Wiley & Sons, Ltd.
|
Figure 1.1 Leonardo da Vinci’s helicopter concept |
cylinder of an engine fired with a spark. He obtained good results but injured himself and one of his colleagues by singeing! Edison was not daunted and later work provided estimates of the required power/weight ratio that would allow a flyable helicopter to be achieved.
The absence of a powerful enough engine dogged the early 1900s; however, in September 1907 Louis Breguet achieved a milestone of the first man lifted with a tethered rotary-winged aircraft. The altitude was a mere 2 ft, but a 1 minute flight was the result. However, stability was obtained by four assistants actually holding the aircraft. He later built two other air vehicles but suffered from lack of sufficient power and lack of control both in flight and in landing.
November 1907 saw Paul Cornu achieving what is often considered to be the first ‘true flight’ of a helicopter. The vehicle rose to an altitude varying between 1 and 5 feet for a period of 20 seconds. It was fitted with two rotors of approximately 20 feet diameter mounted in a tandem layout – see Figure 1.2. Forward propulsion was provided by vanes positioned underneath the
|
|
rotor discs which deflected the rotor downwash backwards and downwards. The efforts of Breguet and Cornu highlighted the importance of stability and control in flight.
In 1909, a pioneering figure appeared who was to become very influential in the history of the helicopter. He was Igor Sikorsky, who initially built two helicopters which proved unsuccessful. This was the short-term result, but it taught the Russian about what to do and what not to do. In the interim period he moved to fixed-wing aircraft but 20 years later he was to bring the lessons of the past into focus and become a dominant figure in helicopter technology.
The year of 1912 saw the Danish aviator Ellehammer use cyclic pitch, successfully giving stable and controllable flight for the first time. The vehicle was lifted by two contra-rotating rotors on the same axle. The construction of both was of a ring to which was fitted the blades. The lower rotor was fitted with fabric to increase the lift force. Forward flight was aided by a conventional propeller.
The metric system is taken as fundamental, this being the educational basis in the UK. Imperial units are still used extensively, however, particularly in the USA but also by industry and other organizations in the UK. For dimensional examples in the text and diagrams, therefore, those units are used which it is felt have stood the test of time and may well continue to do so. Often units in both systems are quoted; in other cases reference may need to be made to the conversion tables set out below. In either system, units other than the basic one are sometimes used, depending on the context; this is particularly so for velocity, where for example aircraft flight speed is more conveniently expressed in kilometres/hour or in knots than in metres/second or in feet/second. The varieties used in the book are included in the table.
|
Quantity |
Metric unit and symbol |
Imperial equivalent |
|
Primary quantities: Mass |
kilogram (kg) |
0.0685 slug |
|
Weight |
newton (N) |
0.2248 pound (lb) |
|
Length |
metre (m) |
3.281 feet (ft) |
|
Time |
second (s) |
1.0 s (sec) |
|
Temperature |
kelvin (K) |
Celsius (°C) |
|
Temp(K) = temp (°C) + 273.15 Derived quantities: Weight (force) |
kilogram force |
|
|
9.807N (kg) |
2.2046 lb |
|
|
Density |
kg/m3 |
0.00194 slug/ft3 |
|
Pressure |
N/m2 |
0.0209 lb/ft2 |
|
Velocity |
0.1020 kg/m2 m/s |
3.281 ft/sec |
|
3.600 km/h |
196.86 ft/min |
|
|
Acceleration |
m/s2 |
1.941 knots 3.281 ft/sec2 |
|
Accel. of gravity |
9.807 m/s2 (g) |
32.2ft/sec2 |
|
Power |
watt, N m/s (W) |
0.7376 ft lb/sec |
|
Metric horsepower |
75 kg m/s (mhp) |
0.9863 HP |
|
English horsepower |
76.04 kg m/s |
550 ft lb/sec |
Abbreviations
|
ABC |
Advancing Blade Concept |
|
ADT |
Actuator disc theory |
|
Aero. J. |
Journal of the Royal Aeronautical Society |
|
AFCS |
Automatic flight control system |
|
AGARD |
Advisory Group for Aerospace Research and Development |
|
AIAA |
American Institute of Aeronautics and Astronautics |
|
ARC |
Aeronautical Research Council |
|
ASE |
Automatic stabilization equipment |
|
AUW |
All-up weight |
|
BERP |
British Experimental Rotor Programme[1] |
|
BET |
Blade element theory |
|
CFD |
Computational fluid dynamics |
|
CG |
Centre of gravity |
|
DOF |
Degree of freedom |
|
FAI |
Federation Aeronautique Internationale |
|
FOM |
Figure of merit |
|
FUMS |
Fatigue and Usage Monitoring System |
|
HUMS |
Health and Usage Monitoring System |
|
IFR |
Instrument Flight Rules |
|
IGE |
In ground effect |
|
ISA |
International standard atmosphere |
|
JAHS |
Journal of the American Helicopter Society |
|
NACA |
National Advisory Committee for Aeronautics (now NASA) |
|
NFA |
No-feathering axis |
|
NFP |
No-feathering plane |
|
NPL |
National Physical Laboratory |
|
OGE |
Out of ground effect |
|
PIV |
particle image velocimetry |
|
RAE |
Royal Aircraft Establishment |
|
RAF |
Royal Air Force |
|
RLD |
Really low drag |
|
R&M |
Reports and Memoranda of the ARC |
|
SAE |
Society of Automotive Engineers |
|
SA |
Shaft axis |
|
sfc |
Specific fuel consumption |
|
SHM |
Simple harmonic motion |
|
SL |
Sea level |
|
SNP |
Shaft normal plane |
|
TPA |
Tip-path axis |
|
TPP |
Tip-path plane |
|
TRLF |
Transmission loss factor |
|
UAV |
Unmanned aerial vehicle |
|
UK |
United Kingdom |
|
USA |
United States of America |
|
VRS |
Vortex ring state |
|
VTOL |
Vertical take-off and landing |
|
WHL |
Westland Helicopters Ltd |
The first edition of Basic Helicopter Aerodynamics was written by John Seddon and quickly found a place in educating new helicopter engineers and technologists in addition to undergraduates and postgraduates. Very sadly his early demise prevented him from seeing his creation develop. The publishers kindly approached me to conduct the first revision of the book and it was completed nearly a decade ago. It was a real pleasure to provide my own input to the book’s evolution; it was certainly daunting but I believe it still has a firm place in the helicopter world. This same daunting feeling returned about two years ago when the present publishers asked me to prepare a third edition. It is imperative in an introductory text, as this book is, not to take the reader too far into the fine details of the subject; however, it is being unfair to lightly touch on the subject and gloss over important factors which link the various theories and analyses together.
The linking of technical methods is particularly relevant in the helicopter since it is not possible to isolate the aerodynamics of the rotor and overall aircraft from the dynamic responses of the blades themselves. Each influences the other and the complete problem has to be solved.
In 1970, after graduating in mathematics, I arrived at Westland Helicopters in Yeovil to begin my career. I walked into a subject in which I had the mathematical skills but very soon became aware that I needed to learn how to apply that mathematical knowledge. I also soon realized that I was working with some very sharp minds and, with their help, encouragement and a wealth of experience became a colleague. It is due to their dedication and generosity that I came to build a career in helicopter aeromechanics – for which I will always be grateful. I was well schooled in the intricacies of helicopter rotors, initially by Geoff Byham, Ian Simons and Bob Hansford. As my career developed I enjoyed the company of colleagues Alan Vincent, Steve King, Tom Beddoes and John Perry.
I have had many interactions with other academics, researchers, those in the armed forces and a whole host of flyers, and they too have my gratitude. In academia I learnt a great deal from Geoffrey Lilley, Ian Cheeseman, Roddy Galbraith, Roy Bradley, Gordon Leishman, Gareth Padfield and Richard Brown. Working in the helicopter industry allows contact with experts in their field, such as the late Peter Wilby of the RAE, Tim Cansdale of dstl and David Lee of the Empire Test Pilots’ School. One of the great pleasures of working in a university is seeing young minds develop and I was lucky enough to see Ajay Modha, Malcolm Wallace, Mark Jones, Peter Knight and Matthew Orchard through their earliest days in helicopter research and into the aerospace industry. I sometimes felt a twinge of envy when, perhaps with another start, I could have made a greater contribution. However, they are the young minds that will define the future and I will leave it in their capable hands.
To create a book, you need help and contributions and I would like to detail them now. If we start with the text, then the staff of the university must be acknowledged. I am very grateful to
my Head of School, Mark Spearing, for encouraging me to undertake this task. I am in debt to my colleagues, Scott Walker and Hazel Paul, who have been instrumental in keeping me on the rails. Their contribution was to get a set of chapters assembled, in a sensible time, and which read well. This is vital for an introductory text. I owe them some favours. I was very fortunate to have David Lee of the Empire Test Pilot’s School check Chapter 8 and make valuable suggestions to help its readability. The book contains many images and while I was able to produce some myself, I needed to ask for the generosity of many skilful photographers to fill in the many gaps. David Gibbings of Agusta Westland has been very generous with his time in providing images and technical support. In digging around on the Web I encountered high – quality photographic work from Ashai Bagai, Steve Rod, Markus Herzig, John Olafson and Stewart Penney who kindly let me make use of their hard work. John Piasecki of the Piasecki Corporation was very supportive by providing two images of its compound helicopter designs. Christina Gotzhein of Eurocopter was very helpful in supplying two images of its helicopters either in the Himalayas or with their latest design – only just past its first flight! Paul Oelkrug of the McDermott Library at the University of Texas provided the image of the XC 142 and I am grateful for all of his efforts.
Finally, I would like to express my sincere appreciation of the US Navy and Air Force websites which contain a gallery of really outstanding images and which are placed in the public domain. They have made a significant contribution to the content of this book.
I would like to thank Debbie Cox and Eric Willner of John Wiley & Sons, Ltd for their encouragement and willingness to grease the works, which relieves me of many factors required to get a book onto the bookshelves.
I would also like to record my gratitude to one of their colleagues, Nicky Skinner. Nicky provided my main interface with John Wiley & Sons, Ltd and helped me enormously with the nuts and bolts that authors all too easily forget. She also lit the odd fire under me when my mind drifted onto other things and deadlines were approaching at an alarming rate. I was looking forward to seeing it through with her and only recently we met to go for the final push to the book hitting the shelves. She was young, bright and delightful and knew her job inside out, so it was with great sadness I learned that she had passed away, suddenly and all too early. In a fairer world she had her life before her and many authors to encourage and help over the finish line. It is a great shame that this can no longer happen and I would like to acknowledge the many, and valued, contributions she made to the genesis of this book. I will miss her charm and above all her smile. The task of getting the book from computer to the page requires a considerable effort from the production staff and I am very grateful to Genna Manaog for helping the book through its final run in to the printing press. The difference between what you want to say and what you actually say is always a problem. It takes a good copy editor to straighten out the words and I am indebted to Neville Hankins for his contributions.
I have one final acknowledgement to make. My wife Stella has provided me with considerable support over my working life but due to a severe illness has not been able to take part in putting this book together in the normal way. However, I have had her spirit with me throughout and I would hope that she would, under normal circumstances, have approved of the final result. I would like to dedicate this book to her.
In looking at the final version of this book, I am reminded of the long road I have travelled. I started working on helicopters because, quite honestly, I had but one job offer after graduation and that was in the Aerodynamics Research Department at Westland Helicopters. So on 2 September 1970, wearing a brand new suit from Dunn and Co., and on a sunny morning in Somerset, I plunged headlong into the subject. So writing this on 18 February 2011, there are 41 years gone by; sometimes it feels like 141 years and sometimes like 41 days. In either case it has been interesting, difficult, frustrating, maddening but ultimately worthwhile, enlightening, humbling and fun. I have said earlier that I have had support from many colleagues and I consider that I have been lucky indeed. I hope there are still more hurdles to clamber over and while there is a neuron or two left I will keep at it. To you the reader, there is still much to do and I wish you well. I sincerely hope that, in reading this book, you will be encouraged and stimulated. It will never be easy but then, if it was, there would be no satisfaction. If you keep at it there will be the occasional Eureka moment and those are the times when you will feel fulfilled.
Bon voyage.
Simon Newman Winchester March 2011
The original Basic Helicopter Aerodynamics was conceived and written by Dr John Seddon. It found a respected place in the subject of rotary wing aircraft and has informed many. Sadly John Seddon has since passed away and I was very flattered to be asked to revise his manuscript for a second edition. This brought an immediate problem. Do I strip the work down to nuts and bolts or do I revise it as it stands but add my own contributions? Since the book is now under joint authorship, it would have been unfeeling to have pursued the former option since the original concept of John Seddon would have disappeared. For that reason I decided to pursue the latter option of revising the text and adding to it – particularly in the field of illustrations. The design, manufacture and operation of the helicopter rotor tend to be rather esoteric for the newcomer and long textual descriptions can be dry and not helpful. I have added, therefore, a substantial number of images to illustrate and clarify the discussions.
The original diagrams were created by hand, which did not altogether succeed. Since that time, computer technology has improved greatly and the book’s graphics have been updated accordingly. The book’s size has increased to allow for the additions but I have been mindful of the need to retain the compactness of the original work.
Helicopter rotor aerodynamics continues to be investigated. It is essential to introduce recent developments to the student and I intend to maintain this book in a form that will introduce the latest developments. While an introductory text cannot hope to describe new techniques in detail it must be capable of establishing the correct thoughts in the reader’s mind, thus preparing them for more intensive study.
The revisions have been aimed at illustrating, more fully, the various features of rotor aerodynamics and helicopter design. The helicopter is unique in its linking of the aerodynamic and mechanical features and a full appreciation of these air vehicles can only be achieved by understanding these interactions. Many of the extra figures illustrate the diversity in the design and operation of a helicopter and these differences are highlighted in the text.
As with all things aeronautical, a team effort is always needed, and the assembly of this book is no exception. A picture says a thousand words so I have called upon the skills of many people to provide as many photographs as possible to amplify and, hopefully, clarify the explanations. While I have been able to supply a number of these photographs personally, a considerable number have been kindly supplied and I would like to sincerely thank the following people for their generosity. Denny Lombard of Lockheed Martin, Alan Vincent, Alan Brocklehurst and Alan Jeffrey of GKN Westland Helicopters, Harry Parkinson of Advanced Technologies Incorporated, Stewart Penney, Guy Gratton, David Long of Kaman and Steve Shrimpton.
While I am quite pleased with my own photographic attempts, I am mindful that the pictures were taken on the ground, usually on a pleasant warm day with plenty of time to press the shutter release. In contrast, the above mentioned people have obtained better quality results while often hanging out of an aircraft in very difficult situations. This marks the difference between the amateur and the true professional.
I would also like to thank my colleagues and researchers who have provided much thought provoking discussion, which I hope, is reflected in the book. I am very grateful to David Balmford for his suggestions in correcting the text. I also would like to express my thanks to Ian Simons for his constant advice on all matters aeronautical. I offer many thanks to Julia Burden at Blackwell Science for her forbearance. The manuscript was late and she stuck with it, probably biting her lip but giving me valuable support. She offered me the task of revising the book and I hope she is not disappointed.
Finally I would like to thank my wife, Stella, for putting up with my constant whizzing around putting the final touches to this work, snatching a cup of coffee as I speed by.
Simon Newman Winchester January 2001
During the past decade and a half, several noteworthy textbooks have been published in the previously neglected field of helicopter aerodynamics, spurred no doubt by a growing acceptance world-wide of the importance of the helicopter in modern society. One may cite in this context Bramwell’s Helicopter Dynamics (1976), Johnson’s Helicopter Theory (1980) and Rotary Wing Aerodynamics (1984) by Stepniewski and Keys. The appearance now of another book on the subject requires some explanation, therefore. I have three specific reasons for writing it.
The first reason is one of brevity. Bramwell’s book runs to 400 pages, that of Stepniewski and Keys to 600 and Johnson’s extremely comprehensive treatment to over 1000. The users I have principally in mind are University or Polytechnic students taking a short course of lectures – say one year – in the subject, probably as an ‘optional’ or ‘elective’ in the final undergraduate or early post-graduate year. The object in that time is to provide them with a grounding while hopefully stimulating an interest which may carry them further in the subject at a later date. The amount of teaching material required for this purpose is only a fraction of that contained in the standard textbooks and a monograph of around 150 pages is more than sufficient to contain what is needed and hopefully may be produced at a price not beyond the individual student’s pocket.
My second reason, which links with the first, concerns the type of approach. This book does not aim at a comprehensive treatment but neither is it content to consign problems to the digital computer at the earliest opportunity. In between lies an analytical route to solutions, taken far enough to produce results of usable accuracy for many practical purposes, while at the same time providing a physical understanding of the phenomena involved, which rapid recourse to the computer often fails to do. It is this route that the book attempts to follow. The analytical approach is usually terminated when it is thought to have gone far enough to serve the stated purpose, the reader being left with a reference to one of the standard textbooks in case he should wish to pursue the topic further.
The third reason is one of content. Despite the need for brevity, I have thought it worthwhile to include, in addition to treatments of the standard topics – momentum theory, blade element theory, basic performance, stability and control – a strong flavour of research and development activity (Chapter 6) and of forward-looking, if speculative, calculations (Chapter 7). It might be considered that these items are of such a transitory nature as not to be suitable for a textbook, but my criterion of stimulating the student’s interest is what has determined their inclusion. Certainly they have proved to be interesting in classroom presentation and there seems no reason why that should not be so for the written word.
In addition to meeting the needs of students, to whom it is primarily addressed, the book should have an appeal as background material to short courses held in or on behalf of industry: such courses are increasing in popularity. Companies and research establishments may also find it useful for new entrants and for more established workers requiring a ‘refresher’ text.
Reverting to the matter of brevity, the recent publication Helicopter Aerodynamics by Prouty is a most admirable short exposition, well worth studying as an adjunct to any other textbook: however it shuns the mathematics completely and therefore will not suffice alone for the present purposes. Saunders’ Dynamics of Helicopter Flight is not greatly beyond the target length but as the title implies it is concerned more with flight dynamics than with aerodynamics and is adapted more to the needs of pilots than to those of engineering students already equipped with a general aerodynamic background.
I have taken it as a starting point that my readers have a knowledge of the aerodynamics of lifting wings as they exist in fixed-wing aircraft. A helicopter rotor blade performs the same function as a lifting wing but in a very different environment; and to note the similarities on the one hand and the distinctions on the other can be a considerable fillip to the learner’s interest, one which I have tried to nurture by frequent references back to fixed-wing situations. This again is a somewhat non-standard approach.
Substantial omissions from the book are not hard to find. A historical survey might have been included in Chapter 1 but was thought not necessary despite its undoubted interest. To judge by the work effort it attracts, wake analysis (‘Vortex theory’) deserves a more extensive treatment than it gets (Chapters 2 and 5) but here it was necessary to refrain from opening a Pandora’s box of different approaches. Among topics which could have been included in Chapter 5 are autorotation in forward flight, pitch-flap coupling and blade flexibility but these were seen as marginally ‘second-line’ topics. The forward look in Chapter 6 might have contained a discussion of the potential of circulation control, the only system which is capable of attacking all the three non-uniformities of rotor blade flow, chordwise, spanwise and azimuthal; but the subject is too big and too distinct from the main line of treatment. The reference to autostabilization in Chapter 8 is brief in the extreme but again the choice was between this and a much lengthier exposition in which aerodynamics would have been largely submerged beneath system mechanics and electronics.
In compiling the book I have been greatly helped by discussions with Mr D. E.H. (‘Dave’) Balmford, Head of Advanced Engineering at Westland Helicopters, to whom my thanks are expressed. Other Westland staff members whose assistance I wish to acknowledge in specific contexts are Dr M. V. Lowson (now Professor of Aerospace Engineering at Bristol University) for Section 7.10, Mr F. J. Perry for Section 6.6, Mr R. V. Smith for Section 7.11 and Mr B. Pitkin for Chapter 8. Naturally the standard textbooks, particularly those mentioned earlier, have been invaluable in places and I trust that this fact is duly recognized in the text and diagrams.
Formal acknowledgement is made to Westland Helicopters for permission to reproduce the photographs at Figures 2.11,4.10,4.11, 7.6 and 7.7; to Edward Arnold, Publishers, for the use of Figures 2.10, 2.13, 5.1, 5.3, 6.3, 8.5 and 8.6 from A. R.S. Bramwell’s book Helicopter Dynamics (1976); to Mr P. G. Wilby of the Royal Aircraft Establishment for Figures 6.2 and 6.5, which are reproduced with the permission of the Controller of Her Majesty’s Stationery Office; and to Dr J. P. Jones for the use of Figures 2.12, 4.2 and 4.4.
My thanks are due to Molly Gibbs of Bristol University who copy-typed the manuscript and to my grandson Daniel Cowley who drew the figures.
J. Seddon
The field of aerospace is wide ranging and multi-disciplinary, covering a large variety of products, disciplines and domains, not merely in engineering but in many related supporting activities. These combine to enable the aerospace industry to produce exciting and technologically advanced products. The wealth of knowledge and experience that has been gained by expert practitioners in the various aerospace fields needs to be passed onto others working in the industry, including those just entering from University.
The Aerospace Series aims to be practical and topical series of books aimed at engineering professionals, operators, users and allied professions such as commercial and legal executives in the aerospace industry. The range of topics is intended to be wide ranging, covering design and development, manufacture, operation and support of aircraft as well as topics such as infrastructure operations and developments in research and technology. The intention is to provide a source of relevant information that will be of interest and benefit to all those people working in aerospace.
Helicopters are able to perform a wide range of roles that are not possible with conventional fixed wing aircraft, particularly due to their capability to hover, and to take-off and land vertically. There are a number of technical difficulties that have presented helicopter designers with many challenges over the years, including the aerodynamics of flexible rotors that not only provide lift, but also enable the helicopter to move forward in the desired direction.
This book, Basic Helicopter Aerodynamics, is the third edition of the original version that was written by the late John Seddon. Simon Newman has maintained the ethos of the first book, producing a further revision of this introductory text aimed at undergraduates and engineers new to the field that illustrates the fundamental features of rotor aerodynamics and helicopter design. Importantly, the book also maintains the balance of not delving into too much technical detail, whilst avoiding gross simplification of key important features and physical explanations. There is much to be commended in this latest expanded edition which contains a number of valuable additions to the material.
Peter Belobaba, Jonathan Cooper, Roy Langton and Allan Seabridge
The late John Seddon was a research scientist at the Royal Aircraft Establishment and then Director-General in the UK Ministry of Defence. He later became a consultant to Westland Helicopters.
Simon Newman attended Grammar School in Farnborough near the site of the Royal Aircraft Establishment. He then read mathematics at the University of Southampton, graduating in 1970. Continuing the aircraft theme, he then began a career in helicopter aerodynamics, dynamics and design for the next 41 years. Starting at Westland Helicopters, at Yeovil, Somerset, in 1970 he worked in the Aerodynamics Research Department on rotors systems, performance and aeromechanics. After a year back at Southampton in 1974, where he obtained an MSc in Aeronautics, he returned to Yeovil to work in the Aerodynamics and Dynamics Departments on rotor aerodynamics, blade behaviour and shipborne operations. He was in the Technical Office during the Falklands War, contributing to the technical backup. In 1985 he returned to Southampton as a member of academic staff, reaching the grade of Reader in 2007. His research interests have concentrated on shipborne operations, blade sailing in particular, for which he obtained his doctorate in 1995. Other research has focused on the vortex ring state and the tumble behaviour of microlight aircraft. He has several hobbies, principally photography and golf. Apart from his academic duties, he is also an Esquire Bedell of the University, carrying the mace at graduation ceremonies.