Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




1.1.1 On the Mathematical Modelling of the Aerodynamics of a Lifting System in the Ground Effect
A rational approach to the design of any unconventional vehicle, for which restricted prototype data exists, should be based on an appropriate mathematical model, reflecting the essential features of the craft under consideration.
Ekranoplan can be viewed as such an unconventional type of superfast water transport, utilizing the favorable influence of the underlying surface (ground) upon its lift-to-drag ratio and, consequently, on its economic efficiency, expressed in terms of fuel consumption and direct operating costs.
The ground effect is most pronounced when the main lifting system of the ekranoplan operates at distances of the order of 25% of the chord or less from the underlying surface.[1] From the viewpoint of mathematical modelling this means that the corresponding flow problem involves a least one distinct small parameter – relative ground clearance.
Ekranoplan operates in a wide range of modes, including subsonic cruise flight in the presence of wind and wave perturbations, transient motions at takeoff and landing accompanied by intensive blowing of air under the main lifting surfaces, and floating on water, when the structure of the craft is subject to action of hydrostatic and wave-induced bending moments.
It is worth noting that in the cruising mode of operation in proximity to the ground, the qualities of such a transport in terms of the lift-to-drag ratio, the static and dynamic stability, the steerability, and the ride comfort are extremely sensitive to the design decisions adopted (aerodynamic configuration, geometry of lifting surfaces, takeoff and landing devices, cruise and power augmentation engines, automatic control system).
The mathematical model employed for the purpose of conceptual and preliminary design should meet certain requirements, in particular
• be sufficiently similar to a real system and include most essential factors;
• secure the possibility of fast, inexpensive, and interactive evaluation of the quality of the system;
• be tailored for the application of optimization procedures concerning the economic viability of a transportation system, reserves of stability, etc.;
• be acceptable for prediction of the behavior of the system in extreme situations (risk assessment).
To work out an appropriate tool kit for the aerodynamic design of ekra – noplans, one should be careful in choosing and applying existing mathematical technologies.
At present, two main approaches can be considered:
1. Numerical methods, based on advanced techniques of numerical solution of boundary problems and integral equations, describing a corresponding physical process. In most cases, these approaches do not impose restrictions on the geometry, kinematics or dynamics of the system under modelling. Although many of numerical approaches and algorithms are essentially heuristic and are not backed by proofs of existence, uniqueness, or convergence of the solution, they often lead (when applied by an expert) to mathematically reasonable and physically adequate results. At the same time, from the viewpoint of practical design, numerical approaches have certain inconveniences and shortcomings, especially when used at a preliminary stage of design. These methods
• require powerful computers and considerable CPU time;
• do not provide explicit representation of the structure of the system’s response, which often prompts designers to a path to successful project decisions,
• are not well suited for use in optimisation procedures at preliminary stages of design, which is to a large extent related to the so-called “curse of dimension;”
• in certain cases of practical interest (thin and slender bodies, flows in small gaps, extreme variations of geometry, high Reynolds numbers, etc.) exhibit unsatisfactory convergence and computational instability.
2. In cases when the flow problem is characterized by one or several small parameters (which often happens in practical situations), one can employ, as an alternative, asymptotic approaches, which also have pros and cons.
The disadvantages of asymptotic approaches include substantial restrictions on geometry and magnitudes of kinematic and dynamic parameters; nonuniversal character, which entails the necessity to adapt methods for a concrete problem; the need to use rather sophisticated mathematics to develop solutions and obtain final closed form results.
Nevertheless, from designer’s and system analyst’s points of view, these methods possess some useful properties.
• They are conveniently adapted to consideration of a concrete problem of interest, which lays the ground for development of multifactor cost-effective mathematical models of the system under design;
• They often provide closed analytical formulas and fast algorithms, which is important for the preliminary design stage, as well as for feasibility studies dedicated to evaluation of the quality of a large system;
• They serve to reveal similarity criteria, which are useful for the purpose of design, the processing of experimental data, and identification procedures.
The method of matched asymptotic expansions used in this book to treat the aerodynamics of the ekranoplan at very small relative ground clearances implies separate consideration of the flow in subregions, characterized by different length scales with subsequent “blending”of corresponding solutions. This formalism not only leads to simplification of flow problems in these subregions, but also makes the process of derivation of the solution similar to that of design analysis and synthesis.
It is clear that none of the two approaches (numerical or asymptotic) discussed above, can be seen as a perfect tool for design. In this connection, at least two strategies may be proposed for expedient use of these methods:
• Use of the asymptotic approach for the purpose of conceptual and preliminary design of a craft (for example, for the selection of basic aerodynamic configuration and assessment of expected operational behavior of the system) with subsequent application of numerical techniques and computer codes for the final elaboration of the vehicle;
• Rational synthesis of both numerical and asymptotic methods, implying utilization of all useful properties and the results of the application of asymptotics in computational procedures.
In what follows, a brief survey is presented of the use of asymptotic and numerical methods in the aerodynamics of ekranoplans. This survey by no means pretends to be complete and refers mostly to research work published after 1970.
1.1.2 Asymptotics for Ground-Effect Lifting Flow Problems
The possibility of deriving solutions of the flow problem and corresponding aerodynamic coefficients of a lifting system in a closed form is connected with analytical and asymptotic approaches.
Analytics in a classical sense of the word is mostly related to twodimensional steady-flow problems, involving ground-effect phenomena. To – motika et al. [26] obtained an exact solution for a problem of steady flow past a flat plate at an arbitrary angle of attack in the presence of a ground plane. Therewith, the formulas for the aerodynamic coefficients were expressed in terms of elliptic theta functions. Later on these results were extended to a Zhukovsky type aerofoil with consideration of the case, when the trailing edge of the foil was touching the ground; see Tomotika and Imai [27]. The latter case was also treated by Datwyler [28].
Sedov [29] derived the same results as Tomotika et al. for a flat plate more straightforwardly.
The first asymptotic approaches relevant to ground-effect phenomena employed Prandtl’s lifting line model and its “mirror reflection,” e. g., Wiesels – berger [30], Serebriyskiy [31], etc. In this research, the distance of the wing with a large aspect ratio from the ground was considered to be of the order of the span, whereas the chord of the wing was assumed much smaller than both the span and the ground clearance.
Because the ground effect is most pronounced at very small relative distances h from the underlying surface,[2] it is reasonable to seek an approximate solution of the corresponding flow problem in the form of an asymptotic expansion in terms of a small parameter related to h.
Some of the earlier approaches were based upon asymptotic expansions with respect to a small parameter, which is inversely proportional to the ground clearance. Keldysh and Lavrent’ev [32] applied parameter 1/h to treat the flow past a hydrofoil, moving near a free surface. A similar expansion was used by Plotkin and Kennel [33] to obtain the lift coefficient of an arbitrary thin aerofoil in the presence of a ground plane and by Plotkin and Dodbele [34] and Plotkin and Tan [35] for solving the flow problems for large-aspect – ratio wings and slender wings in motion near a solid wall.
It is obvious that an expansion in 1 jh is appropriate for investigations of the ground-effect phenomena at distances from the boundary, which are larger that the chord of the wing. However, because wing-in-ground-effect vehicles normally operate at distances below 25% of the chord of the main lifting surface, it is practical to introduce a small parameter providing convergence of the solution series at clearances less than the chord. Panchenkov [36] obtained asymptotic solutions of a set of lifting flow problems involving interfaces (free surface and solid wall) in terms of the so-called т-parameter, related to the relative ground clearance by the following equation:
т — л/1 – h 4 /г2 — 2h. (1.1)
It is easy to see that (1.1) transforms a semi-infinite interval of the actual clearance 0 < h < oo to a unit interval of variation of the r-parameter 1 > r >
0. In fact, these solutions were developed as perturbations of the unbounded fluid case (h = oo) and yielded the results of Keldysh and Lavrent’ev for large h. At the same time, the introduction of the parameter r [3] noticeably enlarged the range of validity of the asymptotic solution.
Because wing-in-ground-effect vehicles have maximum aerodynamic efficiency in very close proximity to the ground (i. e., at distances essentially less that the chord and/or the span), it is challenging to develop an asymptotic expansion of the flow problem solution around the limiting case h = 0, rather than h = oo. However, any attempt to develop a straightforward (outer or pedestrian; see Nayfeh [37]) asymptotic expansion of the solution for h —> 0 results in a degeneracy of the flow problem. In fact, from the viewpoint of an outer observer, i. e., at distances of the order of the chord from the lifting surface, the gap between the wing and the ground vanishes. Consequently, within the boundary problem formulation it becomes impossible to satisfy the flow tangency condition on the lower surface of the wing and on part of the ground plane under the wing. In other words, in the outer limit, the channel flow between the lifting surface and the ground is lost. If one stretches the vertical coordinate to retain the gap when h goes to zero, the governing Laplace equation can be shown to lose one dimension, so that the description of the flow above the wing and the ground becomes incomplete. Thus, the problem under consideration definitely displays features of a singular perturbation problem, for which neither an outer nor inner asymptotic expansion is uniformly valid throughout the whole flow field; see Van-Dyke [38]. The flow problem for a wing-in-ground effect is characterized by the “coexistence” of two characteristic length scales (on the one hand, the ground clearance and, on the other hand, the chord or the span of the wing), the ratio of which vanishes when the small parameter h goes to zero. Such a problem can be handled by the method of matched asymptotic expansions (MAE).
Apparently, Strand, Royce, and Fujita [39] were the first to indicate the channel nature of highly constrained flow between the wing and the ground. They stressed the point that in the two-dimensional case the channel flow becomes one-dimensional. However, no method was presented then to determine the total amount of mass flow under the wing without solving the entire flow problem.
The first MAE applications for lifting flows near the ground were introduced by Widnall and Barrows [40] within the framework of linear theory. Their basic linearizing assumption was that both geometric (curvature and thickness) and kinematic (angle of pitch) perturbations are small compared with relative ground clearance h. It was shown that for a thin wing at an angle of pitch 0, the vertical perturbed flow velocities are of the order of 0(0), whereas in the confined region under the wing, the same vertical flow induces a horizontal velocity of the order of 0(0/h). Therefore, the response of the lifting system to perturbations of the same magnitude is amplified in the ground effect compared to the out-of-ground-effect case. It was also demonstrated that for a three-dimensional lifting flow in an extreme ground effect, the corresponding channel flow problem becomes predominantly twodimensional in a horizontal plane parallel to the ground. Thus, as indicated by Widnall and Barrows, the extreme-ground-effect theory forms an interesting complement to Prandtl’s lifting line theory and Jones’s slender body theory, in which flow fields are basically two-dimensional in the transverse and longitudinal planes respectively. Detailed calculations were carried out with an asymptotic error of the order О(h2) for a steady linearized flow around a flat plate near a flat solid wall. As an example of three-dimensional flow, the same authors obtained the leading order results for a flat plate near a wall. A semielliptic flat wing close to the ground was shown to have constant induced downwash in the wake for all aspect ratios and, consequently, to have minimal induced drag for a given lift. The spanwise distribution of aerodynamic loading for this optimal wing turned out to be parabolic rather than elliptic as in the unbounded fluid case. The problem of minimization of induced drag for a range of ram wing transportation vehicles for a variety of guideway configurations and small relative ground clearances was discussed by Barrows and Widnall [160].
Extension of the MAE approach, advocated by Widnall and Barrows [40], to a linear unsteady flow case accounting for flaps, endplates and compressibility effects was carried out by Rozhdestvensky [41]—[48]. Due to the fact that unsteady lifting flow exhibits a finite jump of both perturbed velocity and velocity potential across the trailing edge, the matching of corresponding local flow with the outer and channel flows was performed in terms of pressure. Unsteady aerodynamic derivatives were found in a closed analytical form for a rectangular wing of arbitrary aspect ratio for various unsteady motions versus Strouhal and Mach numbers. It was shown that compressibility effects give rise to some qualitatively new phenomena, which can be characterized as acoustic resonance. On the basis of the asymptotic theory, it was also shown how, to determine suction force, acting upon the rounded leading edge of the wing. In Rozhdestvensky [44], closed form expressions were presented for an induced drag coefficient of a rectangular wing in steady and unsteady motion near the ground with and without leading edge suction. It was demonstrated that, depending on parameters of contributing vertical motions (heave, pitch, deformations) drag or thrust force enhanced near the ground may act. Based on these results, special propulsion systems can be designed, incorporating oscillating wings and wing systems near solid boundaries. Essentially, the idea was utilized of employing the MAE as a mathematical constructor by way of matching appropriate asymptotic solutions, corresponding to different local geometry of the wing (forward and rear flaps, endplates, slots) and/or physical peculiarities of performance of the edges (jet and rotor flaps and endplates, shock or shock-free entry at the leading edge, vortex wake detachment and roll-up) to the main flow solution. A theory of the slotted wing in the extreme ground effect was developed for both lateral and longitudinal gaps on the wing’s surface in steady and unsteady cases, featuring special solutions for the flow in the immediate vicinity of the gap accounting for different possible flow patterns, as well as mass and vorticity transport through the gap.
Kida and Miyai [49] applied the MAE approach to solve the flow problem of a nonplanar wing of finite span in motion very close to the ground. They provided a simple first-order analytical solution for a nonplanar (uncambered in the chordwise direction) wing of small aspect ratio in the form of a power series of the ratio of semispan to the wing’s root chord. The lift and induced drag coefficients were discussed for the case when the chord distribution spanwise was semielliptic. The authors also calculated the lateral (restoring) moment, acting on an inclined wing of semielliptic planform.
Kida and Miyai [50] were the first to extend the approach based on the method of matched asymptotic expansions to the case of a steady linearized flow around jet-flapped wings in very close proximity to the ground. They assumed that both the angle of pitch and the angle of deflection of the jet, emerging through a thin slot in the wing’s trailing edge, are small compared to the relative ground clearance. The Kutta-Zhukovsky condition of smooth detachment of the flow at the trailing edge was replaced by a condition of jet injection at a prescribed angle to the horizon. To describe the form of the jet, the corresponding dynamic and kinematic conditions were introduced. These require, respectively, that the pressure jump across the jet surface should be proportional to its longitudinal curvature and that the said surface should comply with the flow tangency condition. Concrete results were obtained by these authors for a steady two-dimensional flow past a jet-flapped flat plate and a semielliptic flat wing in the ground effect. Kida and Miyai also found the optimal distribution of the jet momentum for which a semielliptic wing in the extreme ground effect has the minimum induced drag for a given lift. Rozhdestvensky [44] used the same technique to derive a solution for a rectangular jet-flapped flat wing and calculated the optimal jet momentum distributions for different aspect ratios.
It should be underlined that at very small relative ground clearances even slight changes in geometry and kinematics of the lifting system may result in considerable perturbations in the channel flow under the wing and, consequently, in the aerodynamic response of the system. Therefore, the theory should account for the nonlinearity of the ground-effect lifting flow with respect to perturbations. Note that in linear theory it is assumed that vertical displacements of points on the wing’s surface are small compared with ground clearance. For example, the angle of pitch (in radians) is small with respect to relative ground clearance. In nonlinear approaches this restriction has to be alleviated.
For the case of the extreme ground effect (leading order) in a compressible isentropic lifting flow, an unsteady, nonlinear three-dimensional treatment of the problem was given by Rozhdestvensky [41, 42]. It was assumed that the wing is advancing at constant speed in the vicinity of a curved ground and, at the same time, is free to perform small vertical motions and deformations. Displacements of points of both surfaces of the wing and the ground were assumed comparable with the ground clearance. Mathematical model of the flow also included vertical gusts. A two-dimensional governing flow equation was derived from the mass conservation considerations for the constrained flow domain under the wing rather than from the formalism of the method of matched asymptotic expansions. Boundary conditions at the edges of the channel flow region were obtained through application of simple physical arguments such as continuity of pressure at the trailing edge and continuity of the velocity potential at the leading and side edges. In the incompressible flow limit (Mach number equal to zero), the channel flow equation was shown to yield a quasi-harmonic equation, which differs from the well-known shallow water equation only in the sense that the distribution of ground clearance – both chord and spanwise – is prescribed.
Later, a leading-order nonlinear formulation of the problem was developed by Tuck[4] for a two-dimensional (1980, unsteady [52]) and three-dimensional (1983, steady [53]) incompressible flows and by Newman [54] for a lifting surface of small aspect ratio. In Tuck [52], a one-dimensional channel flow problem was reduced to a nonlinear first-order differential equation in time variable as a variable. As an illustration of unsteady flow theory, the problem was solved for a flat plate, driven toward the ground by its own weight and advancing at the same time in a direction parallel to the ground at constant speed.
Newman [54] was able to represent the channel flow beneath the lifting surface by a simple nonlinear solution in a cross-flow plane with appropriate conditions imposed at the trailing and leading (side) edges. A distinguished feature of Newman’s work was that the location of the point separating the leading and trailing edge parts of the wing’s planform contour had to be determined as part of the solution. It should be mentioned that within the linear formulation, the transition between the leading and trailing edges is normally supposed to occur at the wing’s tips. According to Newman, the transition point for the steady flow around a delta wing is located upstream of the traling edge for sufficiently large angles of pitch. For high rates of heave motions of the delta wing, the position of the transition point was shown to be cyclic.
Tuck [53] considered a nonlinear, extreme ground-effect lifting flow for thin wings of arbitrary aspect ratio in association with some problems of aerodynamics of racing cars. He performed numerical calculations for a particular case of a circular planform with exponentially varying clearance. For this particular class of clearance distribution, it became possible to reduce the channel flow equation to a Helmholtz type equation and, using separation of variables, to find corresponding fundamental solutions in the form of modified Bessel functions of the first kind. Unknown constants of the solution, as well as the position of the transition point, were determined numerically through the application of boundary conditions at the leading and trailing edges of the wing. The transition point location was found to shift upstream from the point of maximum local span at positive angles of pitch.
Systematic analysis of nonlinear unsteady three-dimensional flow past a lifting system of finite thickness in a curved ground effect was carried out in Rozhdestvensky [44, 48, 55]. The angle of pitch, maximum relative thickness and curvature, amplitudes of oscillations of the wing, as a solid body and prescribed deformations of its surface as well as the displacements of points of the underlying surface, were assumed to be small quantities of the order of relative ground clearance. In the general case, the main translational motion of the wing parallel to the ground was supposed to be time-dependent. It was formally demonstrated that, if longitudinal and lateral slopes of the upper surface and slopes of the ground are small quantities of the order of h, the outer flow can still be linearized and constructed by a straightforward distribution of sources and sinks on the projections of the wing and the wake on the unperturbed horizontal position of the ground plane with appropriate admissible distributions of singularities along the planform contour. The strengths of singularities were determined directly through a thin body theory with the use of a known first-order downwash in the wake. The latter was obtained through the leading-order channel flow solution and Thomson theorem on conservation of vorticity in the wake. The strength of the source-sink contour distribution was obtained by matching the outer flow to the channel flow through edge flows. Local (edge) flow solutions were shown to be two-dimensional in the planes normal to the wing’s planform contour if the radius of curvature of this contour is large compared with the characteristic ground clearance. The latter circumstance significantly simplifies the process of developing a local solution through the application of powerful technique of complex variable analysis. Matching was performed with respect to the velocity potential at the leading and side edges and with respect to the pressure at the trailing edge. Wherever possible, the channel flow equation was solved in a closed form. Otherwise, a numerical technique is applied, based on a simplified mathematical model for the flow under the wing, or further perturbation parameter expansions were carried out to include nonlinear terms. The effects of thickness and curvature were studied. It was shown, in particular, that lifting and thickness effects are not separable in extreme proximity to the ground and that the dominating (channel flow) contribution is determined by the configuration of the lower surface of the wing-in-ground effect. The influence of waves on the underlying surface was studied for both cases of translational motion of the wing in the direction normal to the wave front and for an arbitrary course angle in Rozhdestvensky [56, 57], respectively. Another solution of the former problem was also given by Efremov and Lukaschik [58].
A similar theory was published for a particular case of an incompressible flow around a thin lifting surface in the curved ground effect by Qian-Xi Wang [59]. In this work translational motion of the wing along the ground was assumed to take place at constant speed. Based on the fact that the input of the channel flow equations involved the instantaneous distribution of clearance rather than ordinates of the wing’s lower surface and that of the solid boundary, the author formulated an equivalence rule between the extreme curved ground effect and flat ground effect with an appropriate downwash on the wing. No calculated results were presented.
As indicated previously, due to the dominating influence of the flow between the lower surface of the wing and the ground upon the aerodynamics of the lifting surface in the extreme ground effect, the corresponding threedimensional flow problem can be reduced to that in two dimensions in the planes parallel to the unperturbed position of the underlying surface. Further simplification can be introduced for a wing with endplates moving in close proximity to the ground. In this case, the flow description can be shown to be predominantly one-dimensional. A simple one-dimensional nonlinear mathematical model of the flow past a rectangular wing with small relative clearances under the tips of the endplates was derived and then validated experimentally by Gallington et al. [60, 61]. This approach was based on an assumption that (channel) flow parameters are independent of the chordwise coordinate and on the observation that the leaking flow escapes from under the tips of the endplates into the external region with atmospheric pressure. The author also assumed the occurrence of separation at the tips of the endplates. Though very simple, Gallington’s model agreed qualitatively with experiments and provided interesting similarity criteria. An important consequence of the introduction of this model from the theoretical standpoint was that it helped to overcome a paradox of the infinite (logarithmic) increase of the flow velocity at the gap, encountered by other researchers; see Ando [62].
One of the restrictions of Gallington’s one-dimensional model ensues from the assumption of the constancy of the loading along the chord. As a consequence the model cannot be used for prediction of the longitudinal moment and the characteristics of stability. Secondly, it is confined to the case of steady motion, whereas the analysis of the transient motion of wing-inground-effect vehicles is of utmost importance.
Rozhdestvensky [63] extended Gallington’s one-dimensional nonlinear mathematical model of channel flow, taking into account the chordwise variation of flow velocity (pressure) and introducing unsteady effects.
Certain attention should be attached to integral formulations. The re – seach, referred to so far, was carried out by solving a boundary problem for a wing near the ground. In principle, the same results (at least to the leading order) can be obtained by asymptotic treatment of the integral equation of the lifting surface moving close to a solid boundary. A singular integral equation for the bound vorticity of a lifting surface in the extreme ground effect can be readily derived by using the Biot-Savart formula and the mirror image technique. The kernel of this equation reduces to the classical lifting surface kernel for an unbounded fluid as the clearance-to-chord ratio tends to infinity. In this case, it is not difficult to develop a regular perturbation expansion of the part of the kernel due to the image vortex system in terms of an appropriate parameter, tending to zero when h —> oo. As a result, one would derive a corresponding regular perturbation solution around the infinite fluid case (h = oo). On the other hand, if one lets the clearance-to-chord ratio tend to zero, the regular part of the kernel can be shown to cancel out with the singular part of the kernel. Thus, in the limit of the extreme ground effect, the kernel of the integral equation vanishes. The limiting form of the equation, however, can be shown to be nontrivial. If expansion of the integrand in h is performed properly, the integral equation can be shown to degenerate into a differential equation. It is not a surprise to discover that this differential equation is identical to the channel flow equation derived in the process of solving the boundary problem.
The integral formulation approach was applied to the investigation of a wing-in-ground effect by Panchenkov [64], Kida and Miyai [65] and Rozhdestvensky [66]. Panchenkov [64] was the first to study the limiting degeneracies of the integral equation of the lifting surface in the ground effect. Assuming that the relative ground clearance h goes to zero, he constructed an asymptotic representation of the solution of this equation. The corresponding theory was dubbed the “quadruple theory.” The term quadruple is quite representative because in the limit of vanishing ground clearance the two double layers, namely, the dipole sheets of the main lifting surface and its mirror image with respect to the ground plane approach each other and, eventually, form a nontrivial limiting “quadruple layer.” To the leading order, the quadruple theory gives results identical to the results of matched asymptotics. Higher orders are incomplete due to the fact that no account was taken of asymptotic expansions of the governing integral equation of the wing-in-ground effect near the leading, side, and trailing edges. The contributions of these local descriptions to the aerodynamic characteristics are negligible in the extreme ground effect (leading-order solution), but become more substantial when the clearance increases to 5% of the chord or more.
Kida and Miyai [65] developed what they called “an alternative analytical method for ground-effect aerofoils,” based on asymptotic treatment of a corresponding integral for a steady two-dimensional case. They included in their treatment a flow around a foil near the ground in a somewhat more general situation of a nonparallel stream, a flow problem for an airfoil between parallel walls, the case of an airfoil in a free jet, and the case of an airfoil in a slipstream. For a particular case of a foil near the ground in a uniform stream, the authors applied a special technique of expansion of the integrand, which becomes nonuniform when the difference (x — x’) (where x is the abscissa of a control point, x’ the abscissa of the loading point) is comparable to the ground clearance. In the vicinities of edges, the “local” integral equations on a semi-infinite interval were derived. Finally, it was demonstrated that the expression for the lift coefficient obtained by the authors is identical to that of Widnall and Barrows [40] if truncated to the same order.
Rozhdestvensky [66] utilized the concept of “inner and outer” contributions to the integral equation and demonstrated for both two-dimensional and three-dimensional steady flow cases that at small relative clearance the integral equation degenerates into differential equations, identical to those obtained through the matched asymptotics treatment of the boundary problem. He used this algorithm to determine the leading-order lift coefficient for a flat plate in a two-dimensional flow, small-aspect-ratio wing, and jet-flapped flat plate. The asymptotic description of the edge flow resulting from this formulation was shown to reduce to an integral equation on a semi-infinite interval.
Rozhdestvensky [67] also gave an analysis of the flow past a lifting line and a tandem, comprising two lifting lines, in the immediate proximity to the ground. In the former case, for a vanishing clearance-to-span ratio, he was able to reduce Prandtl’s integr о differential equation to a simple ordinary differential equation of the second order for the distribution of loading spanwise. In the latter case, a system of two integrodifferential equations degenerates for vanishing h/l (l is the ratio of the span to the chord) into a corresponding system of ordinary differential equations of the second order. In both cases, the solutions of the resulting differential equations, subject to conditions of zero loading at the tips of the wing, were obtained in analytical form.
To conclude the part of the survey dedicated to contributions from asymptotic analysis of the integral equation for a lifting surface in the ground effect, one should mention that this technique was extensively used by Efremov et al. [68]—[72] under the name asymptotics of small clearances to investigate the effect of the compressibility of the flow, the flexibility and elasticity of the foil, and the response of a lifting system in the extreme ground effect to the unsteady periodic (oscillations) and aperiodic (abrupt variation of the angle of pitch, the influence of a step-type vertical gust) perturbations.
The larger the wing-in-ground-effect vehicle, the more effective it becomes in both economic performance and seaworthiness. At the same time, the elasticity of the vehicle can no longer be neglected, and both theoretical and experimental evidence exists that the static (divergence) as well as dynamic stability (flutter) of an elastic wing-in-ground effect worsens as the ground clearance decreases.
There are very few works connected with mathematical modelling of the flow around an aeroelastic wing moving in close proximity to the ground. The limiting flow model of the ground effect based on matched asymptotics, in conjunction with appropriate mathematical models of an elastic structure subject to action of aerodynamic loads, facilitates evaluation of the aeroelastic behavior of the lifting surface in motion near an underlying surface. To the author’s knowledge, Efremov [70]—[72] was the first to use the asymptotics of small clearances to provide some qualitative and quantitative prediction of aeroelastic phenomena for schematized lifting flows in the extreme ground effect. To relate elastic displacements of the wing’s surface with aerodynamic loads, he used the well-known equation of the unsteady bending of an elastic plate accounting for longitudinal and lateral stresses in its mean plane and the boundary conditions, corresponding to the mode of fastening the plate at the planform contour. Using a linearized version of the aerodynamics of a lifting surface in the extreme ground effect, he was able to derive a system of coupled equations for the aeroelastic lifting surface moving in close proximity to a solid boundary and to reduce this system to one differential equation with respect to deformations. In particular, Efremov studied the case of a two-dimensional foil. It was shown that the speeds of divergence and the flutter of the lifting foil in the ground effect decrease as the ground clearance diminishes.
Lifenko and Rozhdestvensky [73, 74] used the same approach to study the aeroelasticity of a lifting surface of finite aspect ratio in the extreme ground effect. To solve the corresponding combined aeroelastic equation, they used the Bubnov-Galerkin method. The same asymptotics (in the relative ground clearance) for the critical speeds (divergence and flutter), as in Efremov [71], was found. Quantitative results were presented to describe both the static and dynamic stability domains for an elastic lifting surface in the ground effect in parametric space.
This review featuring the applications of the matched asymptotics technique to the aerodynamics of lifting systems in the ground effect would be incomplete without a brief discussion of a cycle of Japanese works dedicated to optimal ground-effect lifting systems with average clearance of the order of the span and small gaps between the tips of the wing and the ground plane. Kida and Miyai [75] and Mamada and Ando [76, 77] applied the MAE approach to develop a ground-effect theory for a wing, having arbitrary front – view shapes and vanishing gaps under the tips. The problem was reduced to consideration of flow in the Trefftz plane and, therefore, holds for the case when both the angle of pitch and the longitudinal camber are reasonably small and, in addition, the spanwise distribution of the lift is optimal in
Munk’s sense. The main idea of the approach is based on an observation that, in the outer limit, the tip gap disappears and the flows above the wing and under the wing can be considered separately, accounting for a possible point source (outside) and sink (inside) at the intersection of the wing’s contour in the Trefftz plane with the ground. The inner flow in the vicinity of the gap under the tip of the wing and the ground was considered in stretched variables and contains the limiting geometry of the tip (a semi-infinite flat slit tangent to the tip) and the ground plane. The matching procedure enables determination of both the local flow pattern and the strengths of the outer source-sink flows, which model the leakage of the flow through the gap at distances of the order of the span. Ando and Ando and Yashiro [78, 79] introduced certain simplifications into the solution of Kida and Miyai [75]. In particular, they found more simple procedures to develop the outer solutions. In addition, they carried out their formulation explicitly for arbitrarily curved (laterally) wings, whereas Kida and Miyai confined their analysis to concrete cases.
The earliest, albeit unintentional, use of the ground effect in technology is probably due to the Wright brothers whose gliders covered longer distances when flying close to the sands. Later, in 1910, some pilots reported a peculiarly “different feel,” when their aeroplanes flew closer to the ground. This phenomenon, referred to in the literature as a “cushioning effect,” sometimes led to a sudden loss of lift. Nonetheless, the influence of the ground was revealed to be something more than just aerodynamic nuisance after a 56 t Dornier DO-X seaplane increasing its payload and range when flying near
K. V. Rozhdestvensky, Aerodynamics of a Lifting System in Extreme Ground Effect © Springer-Verlag Berlin Heidelberg 2000
the water during its transatlantic service in the early 1930s. It is probable that this evidence triggered a purposeful engineering effort to conceive a craft to take advantage of the ground proximity.
From 1935 a Finnish engineer, Kaario, had been working on a series of his “Aerosledge” vehicles, which were basically a low-aspect-ratio wing mounted on skis. Kaario’s craft showed pitch instability, which was later on recognized as an inherent feature of wing-in-ground-effect vehicles. Following Kaario’s work, many projects of large ground effect machines and real, albeit moderately sized, vehicles appeared; see Belavin [1], Ollila [2], Hooker [3], Rozhdestvensky [4].
The list of projects of large craft includes, for example, Weiland’s “Large Weilandcraft,” “Columbia” of the Vehicle Research Corporation, Boeing’s “Lowboy,” Grumman’s missile ekranoplan, SETOL by McDonnell Douglas, Bertin’s “Signe-14” and others.
Among the moderately sized vehicles built one can name TYoeng’s “Aer – oboat,” Bertelson’s GEMs, Kawasaki К AG series, the Lippisch Aerofoil Boat and their derivative “Airfish” [5, 6], Jorg’s Tandem Flairboats [7, 8], China’s RAM and PAR vehicles [9, 10], Kubo’s /і-Sky Sliders developed with the support of Mitsubishi [11, 12], more recent two-seater vehicles “Hoverwing 2-VT” of Fischer Flugmechanik [13, 14], and “Hydrowing VT-01”of Techno – trans [15, 16].
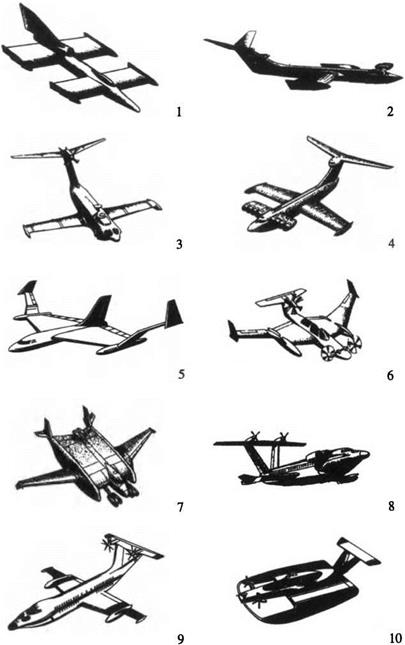
Starting from the 1960s Russia took the world’s lead in creating large ekranoplans, [17]—[21]. This became possible due to the outstanding effort of Rostislav Alexeyev and his famous Hydrofoil Design and Construction Bureau in collaboration with other leading institutions and enterprises. During the following two decades a number of ekranoplans had been built with takeoff weights of 120 through 550 t and a cruise speed in the range of 350-500 km/h. The largest of these was and still is the KM (ship prototype), dubbed in the West, the Caspian Sea Monster. A collection of Russian wing-in-ground-effect vehicles is shown in Fig. 1.1. It reflects the evolution of design concepts and building technology for ekranoplans. Shown in Fig. 1.1 are
• 1 – the tandem scheme borrowed from the hydrofoil design and developed by Alexeyev in the early 1960s.
• the first-generation vehicles, based on an aeroplane type aerodynamic configuration with a fuselage, a highly elevated tail unit, and a power – augmented takeoff feature: 2 – KM, 1967, designed by Alexeyev; 3 – Orly – onok, 1972, designed by Alexeyev and Sokolov [22]; 4 – Loon/Spasatel, 1987, designed by Kirillovykh [20]. One should note that the highly mounted tail surface in the aeroplane scheme is intended to secure (pitch) stability to longitudinal motion.
• the concepts and projects of a new generation of ekranoplans with flying wing and composite wing configurations: 5 – Alexeyev’s flying wing concept (late 1970s); 6 – composite wing configuration (Alexeyev, 1970s); 7 – Bartini’s contact free takeoff (landing) craft with a composite wing aero-
|
Fig. 1.1. A Collection of Russian Ekranoplans in Concepts and Vehicles. |
dynamic scheme [23]; 8 and 9 – Marine Passenger Ekranoplans MPE 400 and MPE 200, designed by Sinitsyn [24].
It should be added that pitch stability for the tailless flying wing configuration 5 can be ensured by special profiling of wing sections and the use of an automatic motion control system. The composite wing scheme (6-9) employs the idea of a functional subdivision of the vehicle’s lifting area into two parts. The central wing of the system enables taking full advantage of power augmentation (blowing under the wing) at takeoff. Side wings add efficiency and, if properly positioned, longitudinal stability in cruising. Further elaboration of the composite wing scheme can be achieved by profiling wing sections, which serves to reduce the tail unit and, consequently, empty weight fraction.
• A smaller vehicle (10; 1996, Sinitsyn) features blowing under the wing (power augmentation) both during takeoff (landing) and cruising. This craft known by the name Amphistar is a six-seater with a cruising speed of 150 km/h [25]. Other examples of the family of unconventional ekranoplans with permanent power augmentation features are Volga-2 and Raketa-2 (project), developed in the Central Hydrofoil Design Bureau named after R. E. Alexeyev.
Aerodynamics of a Lifting System in Extreme
This book is dedicated to the memory of a distinguished Russian engineer, Rostislav E. Alexeyev, who was the first in the world to develop the largest ground effect machine – Ekranoplan. One of Alexeyev’s design concepts with the aerodynamic configuration of a flying wing can be seen on the front page.
The book presents a description of a mathematical model of flow past a lifting system, performing steady and unsteady motions in close proximity to the underlying solid surface (ground). This case is interesting for practical purposes because both the aerodynamic and the economic efficiency of the system near the ground are most pronounced. Use of the method of matched asymptotic expansions enables closed form solutions for the aerodynamic characteristics of the wings-in-ground effect. These can be used for design, identification, and processing of experimental data in the course of developing ground effect vehicles. The term extreme ground effect, widely used throughout the book, is associated with very small relative ground clearances of the order of 10% or less. The theory of a lifting surface, moving in immediate proximity to the ground, represents one of the few limiting cases that can be treated analytically.
The author would like to acknowledge that this work has been influenced by the ideas of Professor Sheila E. Widnall, who was the first to apply the matched asymptotics techniques to treat lifting flows with the ground effect.
 Saint Petersburg, Russia February 2000
Saint Petersburg, Russia February 2000
1.1 Some Definitions
This book discusses the aerodynamics of vehicles, that utilize the favorable effect of the proximity to an underlying surface upon their performance. Although this underlying surface may be not only land, but also water, snow, or ice, it will be called ground.
In what follows, the ground effect is understood as an increase in the lift-to-drag ratio of a lifting surface (a wing) moving close to the ground. For an appropriately designed lifting surface, this phenomenon exhibits itself at distances from the ground less than the chord of the wing, but the most advantageous range of ground clearances normally lies below 25% of the chord. The term extreme ground effect, widely used throughout the book, is associated with very small relative ground clearances under 10%. This latter range is characterized by a significant increase in the efficiency of the lifting system and is expected to be operational for the lifting systems of the next generation of the craft.
Ekranoplan (a wing-in-ground-effect vehicle) can be defined as a vehicle with an engine and heavier than air that is designed to fly close to an underlying surface for efficient utilization of the ground effect. At present many terms exist to designate such a craft, namely, ekranoplan, wing-in-ground – (WIG) effect vehicle, wing-in-surface-effect ship (WISES), flaircraft, ground effect machine (GEM), etc.